





























© 360 Vision Technology Ltd.
Page 25
Predator Radar Installation Manual V2.1.18.1
Note: Where zones share the same priority the camera will arbitrarily select targets to follow based on the
current target selection mode. However, it will still prioritise both zones over any other zones with a lower
priority. Where zones have different priorities but overlap, the targets appearing in this overlap area will always
be considered to be in the highest priority area. To avoid confusion, we would not recommend the use of
overlapping areas.
12.1.11 Schedules
Each zone supports four schedules. These schedules apply to the active state of the zone and the rule logic.
Whenever a schedule is applied, the zone will only task the camera to follow a target if one or more of the
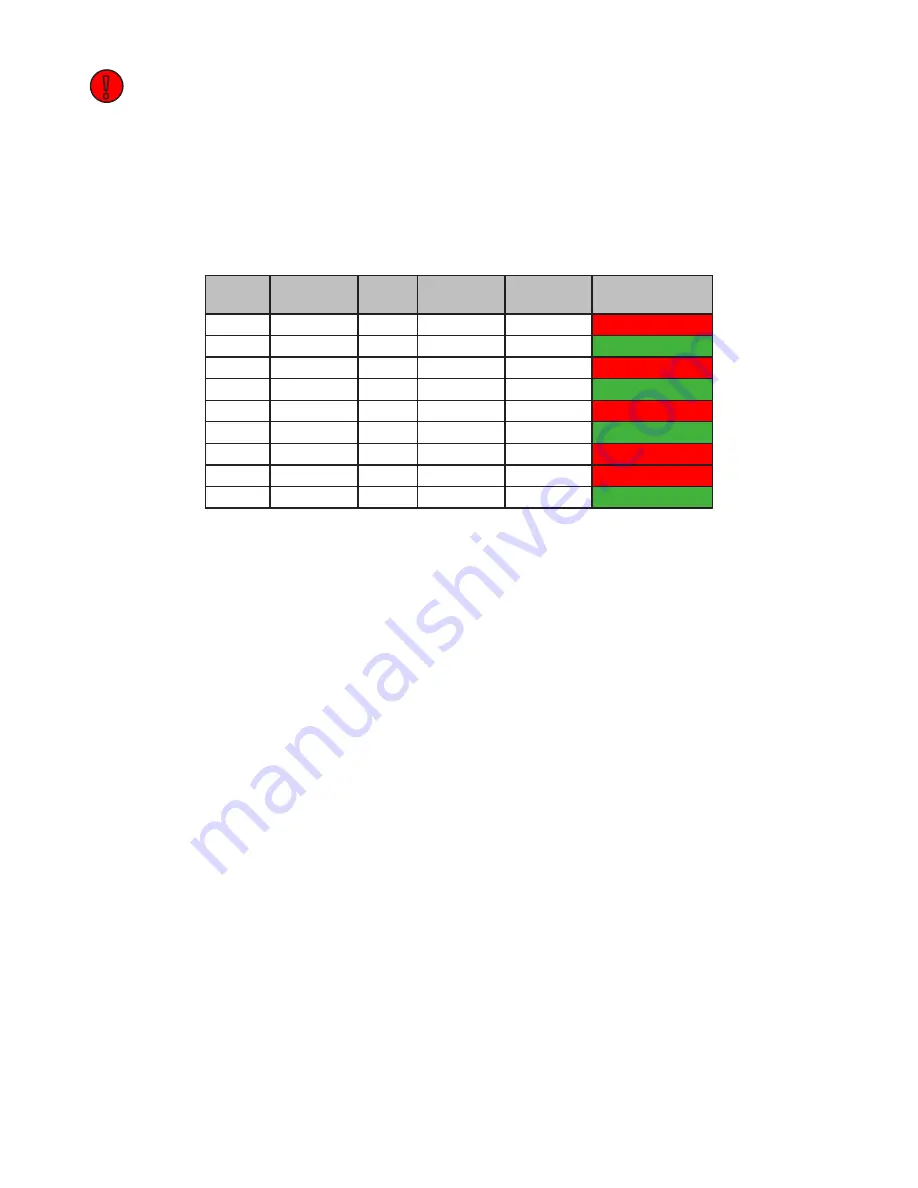
schedules are active. This is how the rules and schedules affect the camera behaviour:
Zone
Rules
Configured
Rules
Broken
Schedule(s)
Configured
Schedule(s)
Active
Result
Inactive
N/A
N/A
N/A
N/A
No following
Active
No
N/A
No
N/A
Follow targets
Active
Yes
No
No
N/A
No following
Active
Yes
Yes
No
N/A
Follow targets
Active
No
N/A
Yes
No
No following
Active
No
N/A
Yes
Yes
Follow targets
Active
Yes
No
Yes
No
No following
Active
Yes
Yes
Yes
No
No following
Active
Yes
Yes
Yes
Yes
Follow targets
A schedule is deemed to be active when the current date and time fall within the configured schedule
parameters. The schedule will always control the overall status of the zone even if rules are configured. Where
more than one schedule is configured, the zone will be active if any of the schedules are active.
Typical examples of schedules include the following:
• The zone is only active between 18:00 – 07:00 for every day of the year (night time).
• The zone is only active Mon – Fri (working week only)
• The zone will be inactive between 14:00 – 16:00 next Friday (one off event)
For more information on configuring schedules, see Section 14.
13 Configuring Zone Rules
Each detection zone can support two rule settings, one for the speed the other for direction. Each rule can be
used alone or both can be used together.
Each rule allows the system to check the speed and direction against values you provide. You can check for
target speed and direction less than or greater than those you specify or you can check for values within a given
range.
If the rules match, then the rule is considered “broken” and the camera will be tasked to follow the target. If the
rules do not match, then the camera will not be tasked and the target will be ignored.
In addition to the value check, each rule includes a break count. This break count tells the rule engine how
many times the rule must be broken before the camera is tasked. This provides a level of confidence that the
target is definitely breaking the rule over several sightings before the camera is tasked to follow. See Section
13.4.
!







































































