





























Note
Action
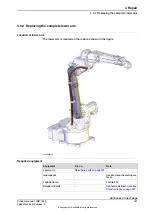
xx0700000093
Carefully fit the wrist (with motor axis 6 fitted)
to the upper arm tube, using the string to pull
the cable harness back through the hole for
the VK cover.
3
A: String
M8x35 8.8-A2F (3 pcs)
Secure the wrist with its attachment screws
and washers.
4
Tightening torque 24 Nm
Note
When reconnecting the connectors
R4.FB6 and R4.MP6, make sure to push
the connectors towards the wrist as far
away from the axis 5-6 cable spiral as
possible, to avoid grease to accumulate
on the resolver connector.
Reconnect connectors R4.FB6 and R4.MP6,
through the hole for the VK cover.
5
Tightening torque 6 Nm
xx1100000355
Secure the flexible coupling with the M5x16
screw.
6
Continues on next page
Product manual - IRB 1520
199
3HAC043435-001 Revision: L
© Copyright 2012-2020 ABB. All rights reserved.
4 Repair
4.4.3 Replacing the wrist unit, IRB 1600ID
Continued
Summary of Contents for IRB 1520
Page 1: ...ROBOTICS Product manual IRB 1520 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 74: ...This page is intentionally left blank ...
Page 132: ...This page is intentionally left blank ...
Page 288: ...This page is intentionally left blank ...
Page 300: ...This page is intentionally left blank ...
Page 302: ...This page is intentionally left blank ...
Page 308: ......
Page 309: ......






































































