





























5.5 Updating revolution counters
Introduction
This section describes how to do a rough calibration of each manipulator axis by
updating the revolution counter for each axis, using the FlexPendant.
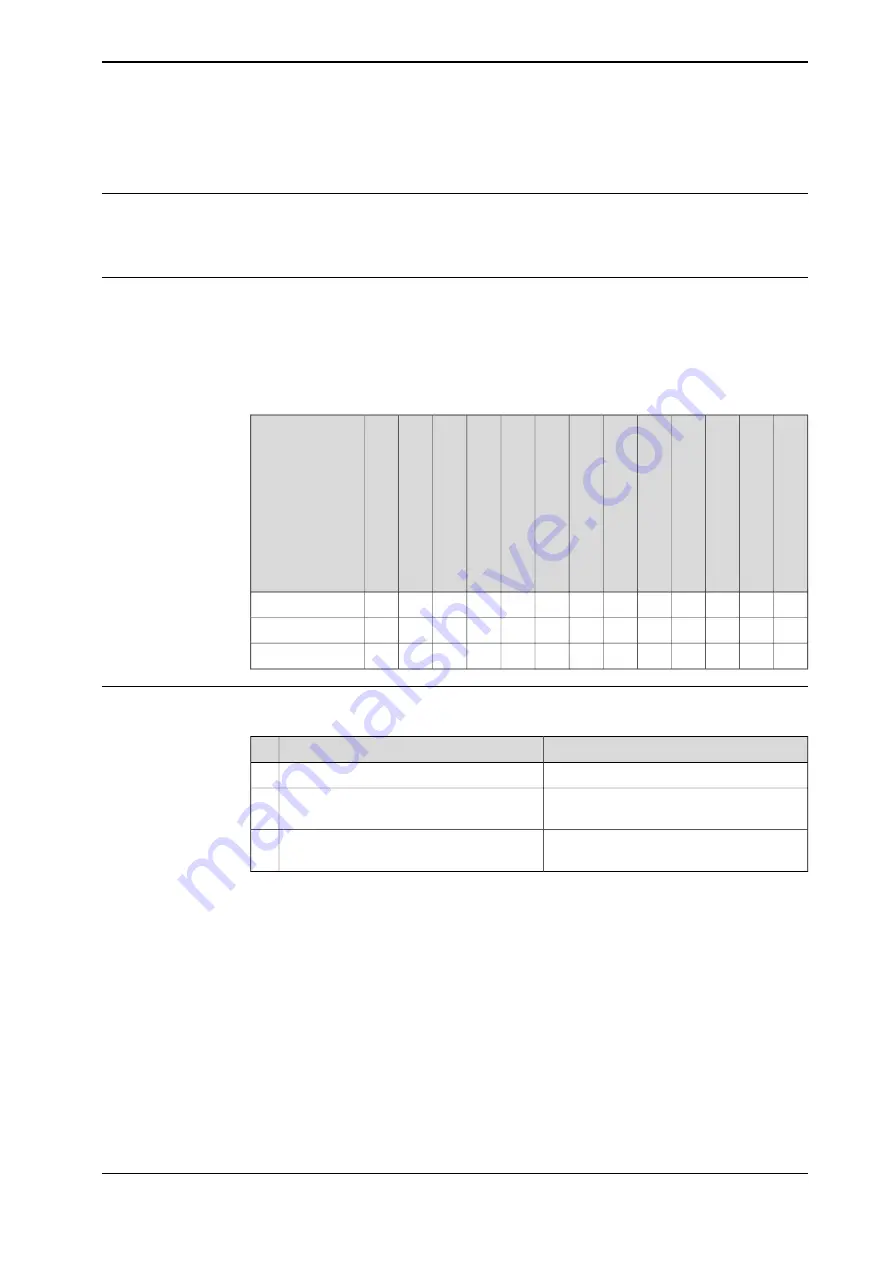
Coupled axes
When updating the revolution counters for a coupled axis, also the axis it is coupled
to needs to be at its synchronization position for the update to be correct; i.e. axis
4 needs to be in synchronization position when updating axis 5 and 6.
With reversed coupled joints, the relationship is the opposite, i.e. axis 4 needs to
be in synchronization position to update axis 3.
IRB
4600
IRB
4450S
IRB
4400
IRB
2600ID
IRB
2600
IRB
2400
IRB
910
SC
IRB
1660ID
IRB
1600ID
IRB
1600
IRB
1520
IRB
1410
IRB
140
Coupled axes
x
x
x
x
x
x
x
Axis 4, 5, 6
x
x
x
x
x
Axis 5, 6
x
Axis 4, 3
Step 1 - Manually running the manipulator to the synchronization position
Use this procedure to manually run the manipulator to the synchronization position.
Note
Action
Select axis-by-axis motion mode.
1
See
Synchronization marks and synchron-
ization position for axes on page 276
Jog the manipulator to align the synchron-
ization marks.
2
Step 2 - Updating the revolution counter
with the FlexPendant on page 280
When all axes are positioned, update the
revolution counter.
3
Continues on next page
Product manual - IRB 1520
279
3HAC043435-001 Revision: L
© Copyright 2012-2020 ABB. All rights reserved.
5 Calibration information
5.5 Updating revolution counters
Summary of Contents for IRB 1520
Page 1: ...ROBOTICS Product manual IRB 1520 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 74: ...This page is intentionally left blank ...
Page 132: ...This page is intentionally left blank ...
Page 288: ...This page is intentionally left blank ...
Page 300: ...This page is intentionally left blank ...
Page 302: ...This page is intentionally left blank ...
Page 308: ......
Page 309: ......







































































