





























Note
Action
xx0800000335
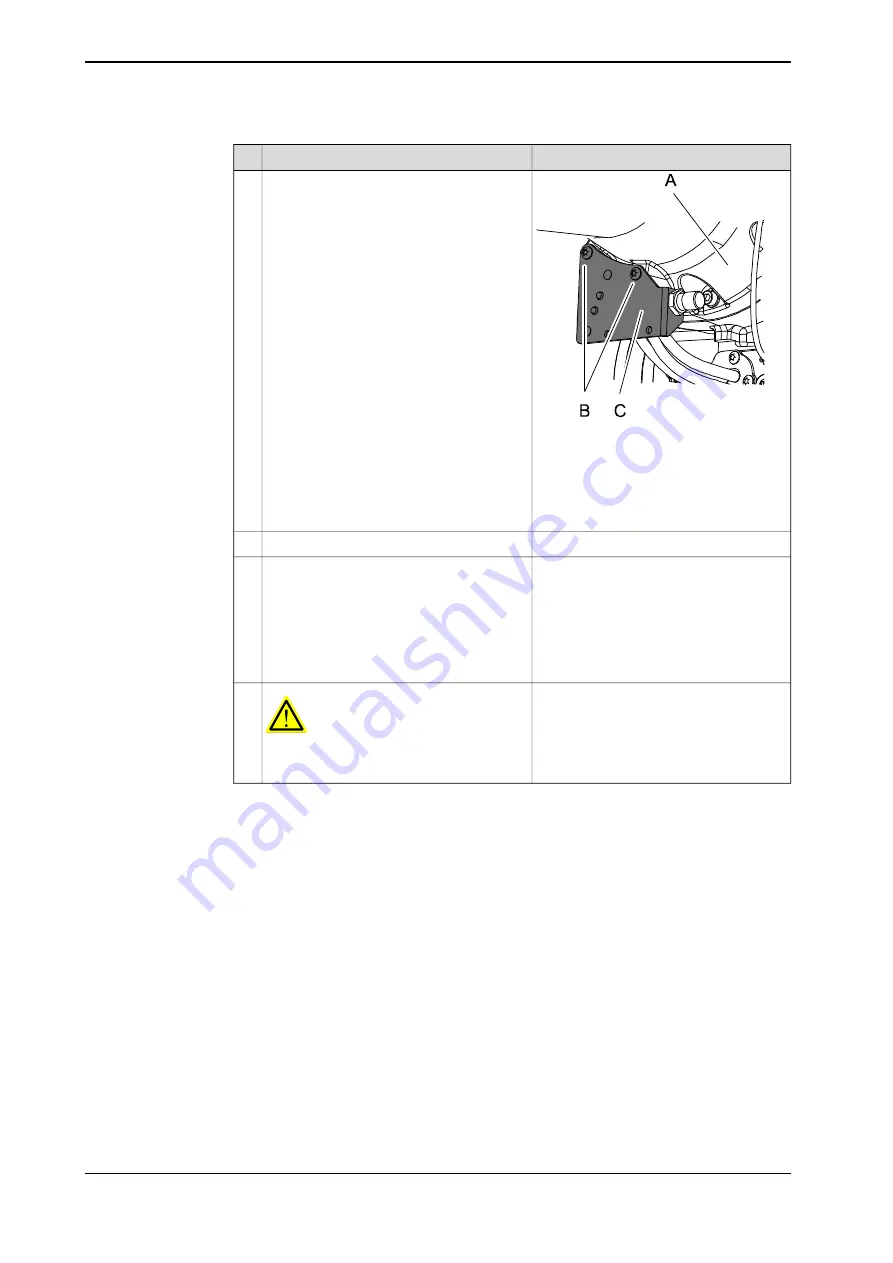
Refit the
bracket
on the
tubular shaft unit
.
12
Parts:
•
A: Tubular shaft unit
•
B: Attachment screws M6x16 qual-
ity 8.8-A2F (2 pcs)
•
C: Bracket
Refit the
signal lamp
, if used.
13
Pendulum Calibration is described in
Op-
erating manual - Calibration Pendulum
,
enclosed with the calibration tools.
Recalibrate the robot.
14
Axis Calibration is described in
with Axis Calibration method on page 348
General calibration information is included
in section
DANGER
Make sure all safety requirements are met
when performing the first test run.
15
256
Product manual - IRB 4600
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
4 Repair
4.4.1 Replacing the complete upper arm
Continued
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......







































































