





























4.6 Frame and base
4.6.1 Replacing stop pin axis 1
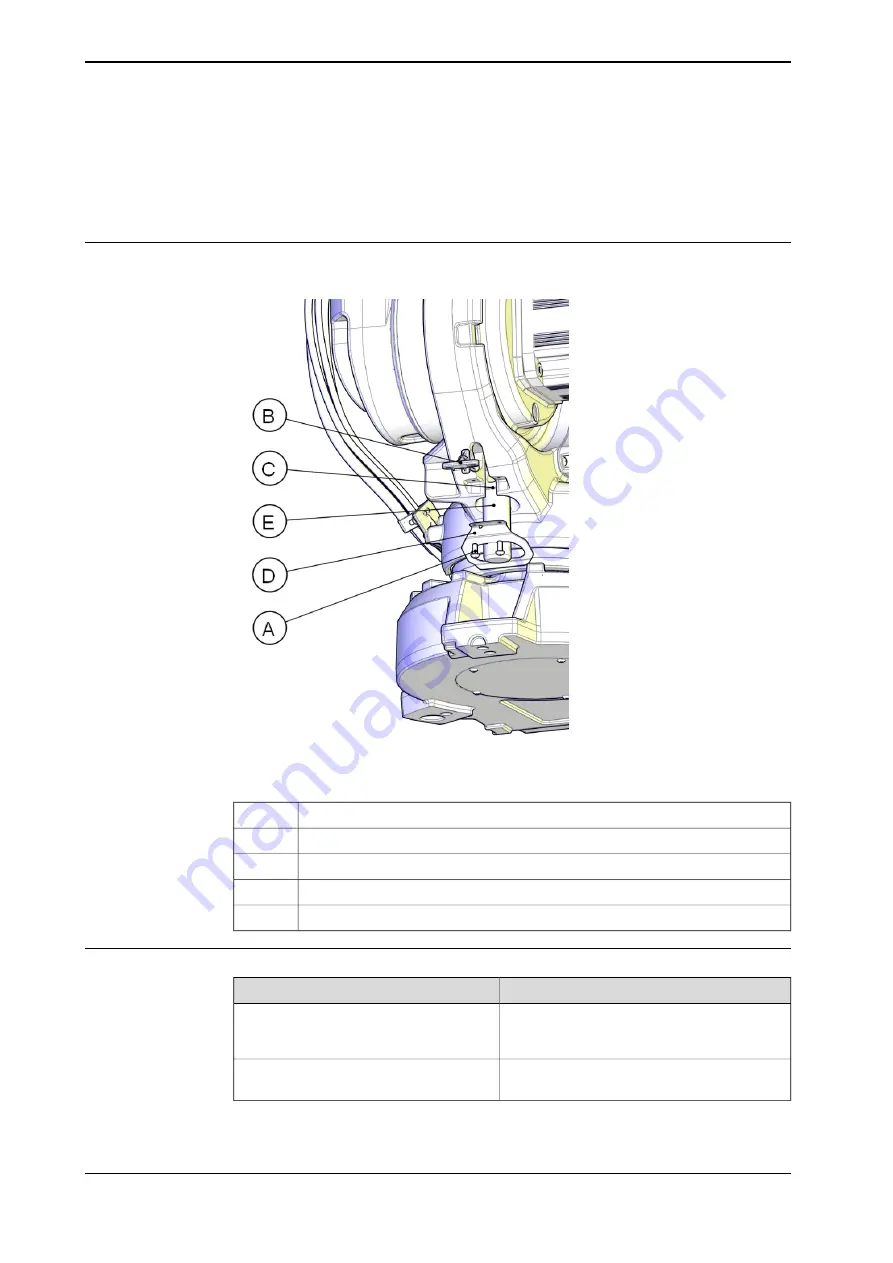
Location of stop pin axis 1
The stop pin axis 1 is located as shown in the figure.
xx0800000045
Attachment screws M6x16 quality 8.8-A2F (2 pcs)
A
Bracket
B
O-ring (2 pcs) - Not used if bracket (D) is installed.
C
Bracket
D
Stop pin
E
Required equipment
Note
Equipment
For spare parts number, see Spare parts -
Frame and base
in
Product manual, spare
parts - IRB 2600
.
Stop pin
Content is defined in section
.
Standard toolkit
Continues on next page
284
Product manual - IRB 4600
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
4 Repair
4.6.1 Replacing stop pin axis 1
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......







































































