





























Note
Action
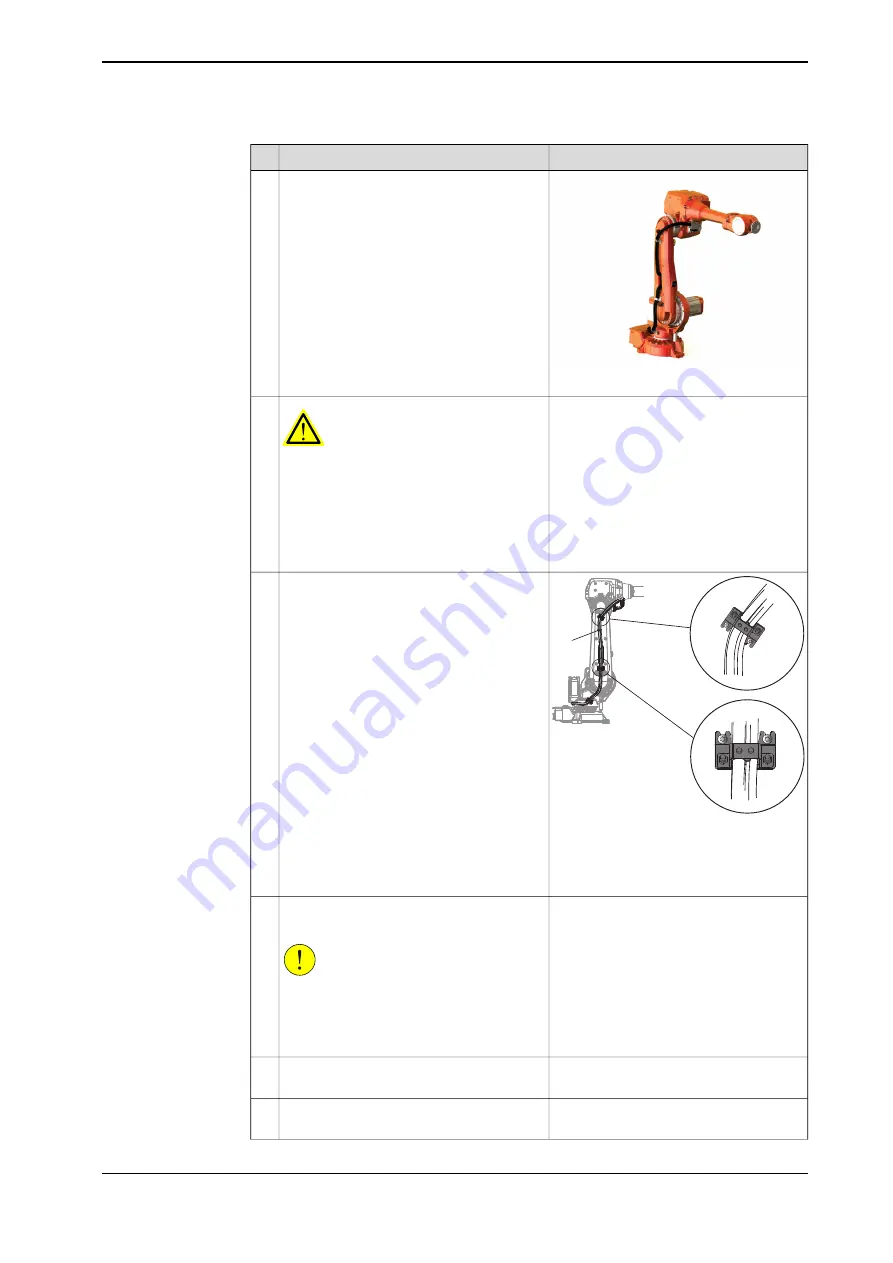
xx0800000336
Move the robot to the position shown in the
figure.
3
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
4
A
B
C
xx1100000946
A Cable bracket
B Cable bracket
C Cable strap
Unscrew the attachment screws securing
the cable harness to the lower arm by the
the two cable brackets and a cable strap.
5
Loosen the cabling from the lower arm by
unhooking the two cable brackets.
CAUTION
The cable harness is still mounted in other
parts of the robot. Make sure not to damage
the cable harness or any cable brackets in
the continued removal.
6
See
Attaching the lifting accessories to
Attach the lifting accessories to the upper
arm.
7
Connect the 24 VDC power supply to the
axis-3 motor and release the brakes.
8
Continues on next page
Product manual - IRB 4600
329
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
4 Repair
4.8.3 Replacing gearbox axis 3
Continued
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......







































































