





























Position of robot axes
The robot axes should be positioned close to 0 degrees before commencing the
calibration program. The axis chosen for calibration is then automatically run by
the calibration program to its exact calibration position during the calibration
procedure.
It is possible to position some of the other axes in positions different from 0 degrees.
Information about which axes are allowed to be jogged is given on the FlexPendant.
These axes are marked with
Unrestricted
in the FlexPendant window. Also the
following table shows the dependencies between the axes.
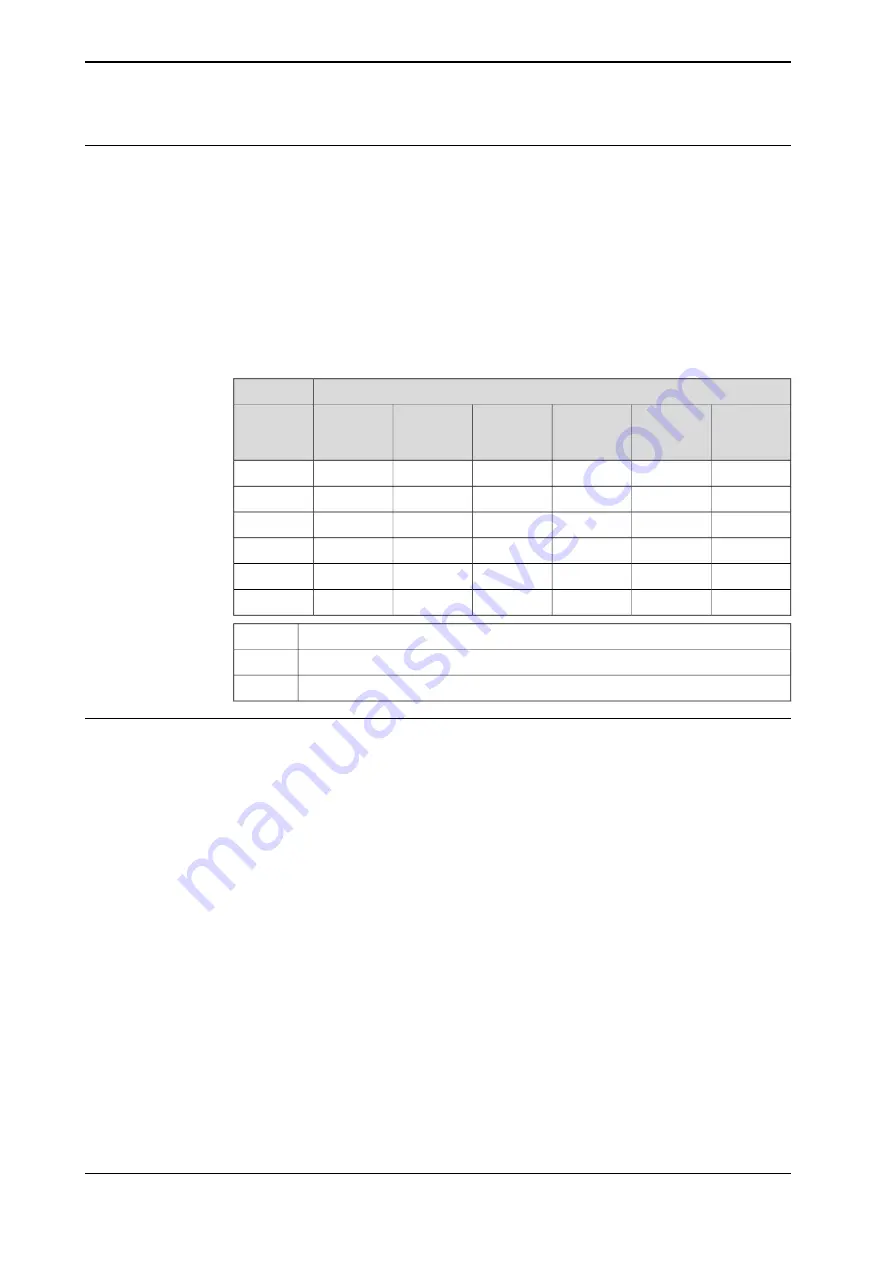
Requirements for axis positioning during calibration
Axis to calibrate
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
Required
position of
axis
*
*
*
*
*
-
Axis 1
*
*
*
0
-
0
Axis 2
*
*
*
-
0
0
Axis 3
0
0
-
*
*
*
Axis 4
0
-
*
*
*
*
Axis 5
-
*
*
*
*
*
Axis 6
Axis to be calibrated
-
Unrestricted. Axis is allowed to be jogged to other position than 0 degrees.
*
Axis must be put in position 0 degrees.
0
How to calibrate a suspended robot
The IRB 4600 is fine calibrated floor standing in factory, prior to shipping.
To calibrate a suspended robot, reference calibration must be used. Reference
values for a suspended robot must be created with the robot mounted at its working
position, not standing on a floor.
To calibrate a suspended robot with the fine calibration routine, the robot must
first be taken down and then be mounted standing on the floor.
350
Product manual - IRB 4600
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
5 Calibration
5.4.1 Description of Axis Calibration
Continued
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......







































































