





























Using the push-button on the robot with an external power supply
This procedure details how to release the holding brakes with the push-buttons,
when the robot is
not
connected to the controller.
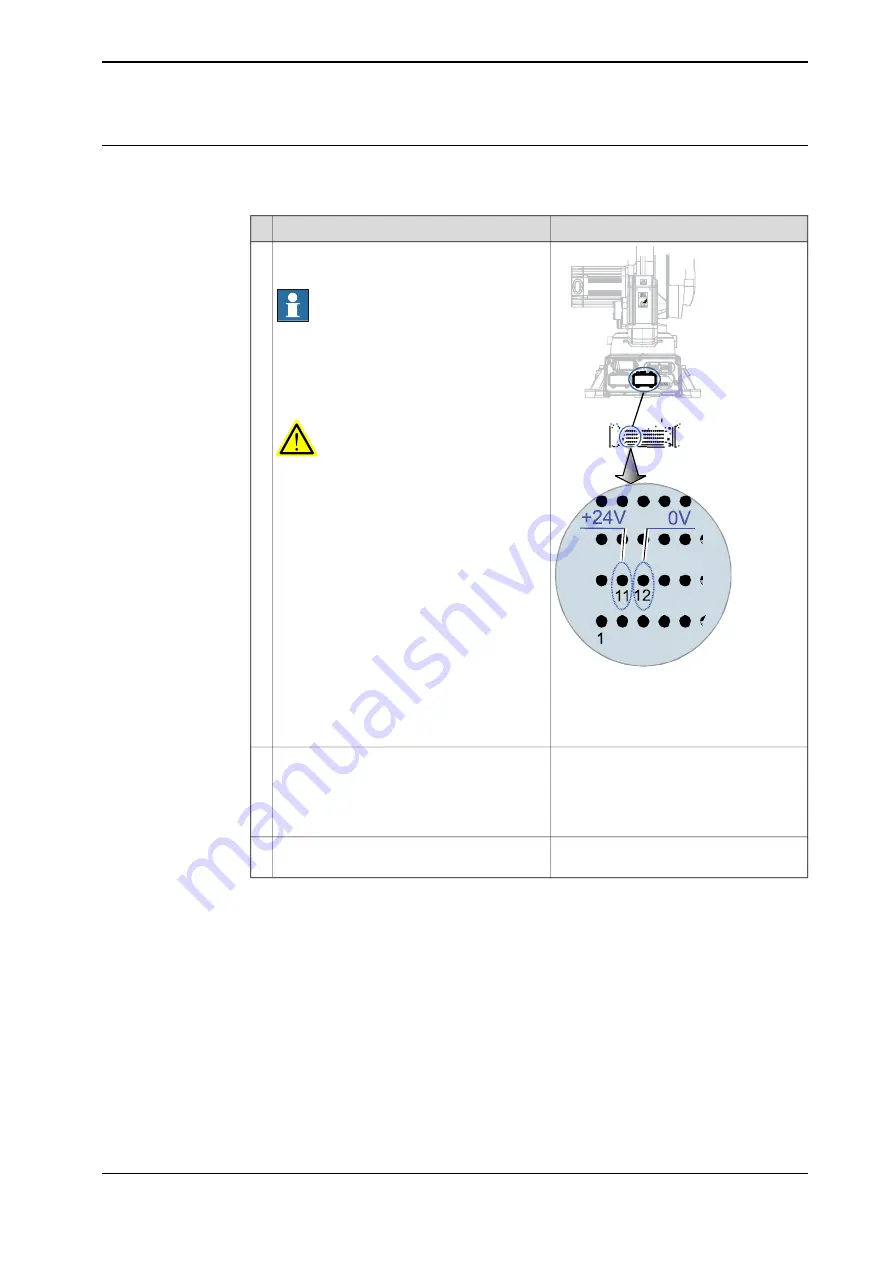
Note
Action
xx0800000269
Connect an external 24VDC power supply to
the connector R1.MP on the robot base.
Note
Be careful not to interchange the 24V and 0V
pins!
If they are mixed up, damage can be caused
to the brake release unit and the system
board!
WARNING
Incorrect connections can cause all brakes
to be released simultaneously!
1
Connect to connector R1.MP:
•
0V to pin 12
•
+24V to pin 11
The brake release unit is equipped with
six buttons for controlling the axes
brakes. The buttons are numbered accord-
ing to the numbers of the axes.
Release the holding brake on a particular
axis by pressing the corresponding button
on the push-button unit and keeping it de-
pressed.
2
See the previous figure.
The brake will function again as soon as the
button is released.
3
Continues on next page
Product manual - IRB 4600
59
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
2 Installation and commissioning
2.3.3 Manually releasing the brakes
Continued
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......







































































