





























2.3.4 Orienting and securing the robot
Introduction
This section describes how to orient and secure the robot to the foundation or base
plate in order to run the robot safely. The requirements made on the foundation
are shown in sections
Loads on foundation, robot on page 45
and
.
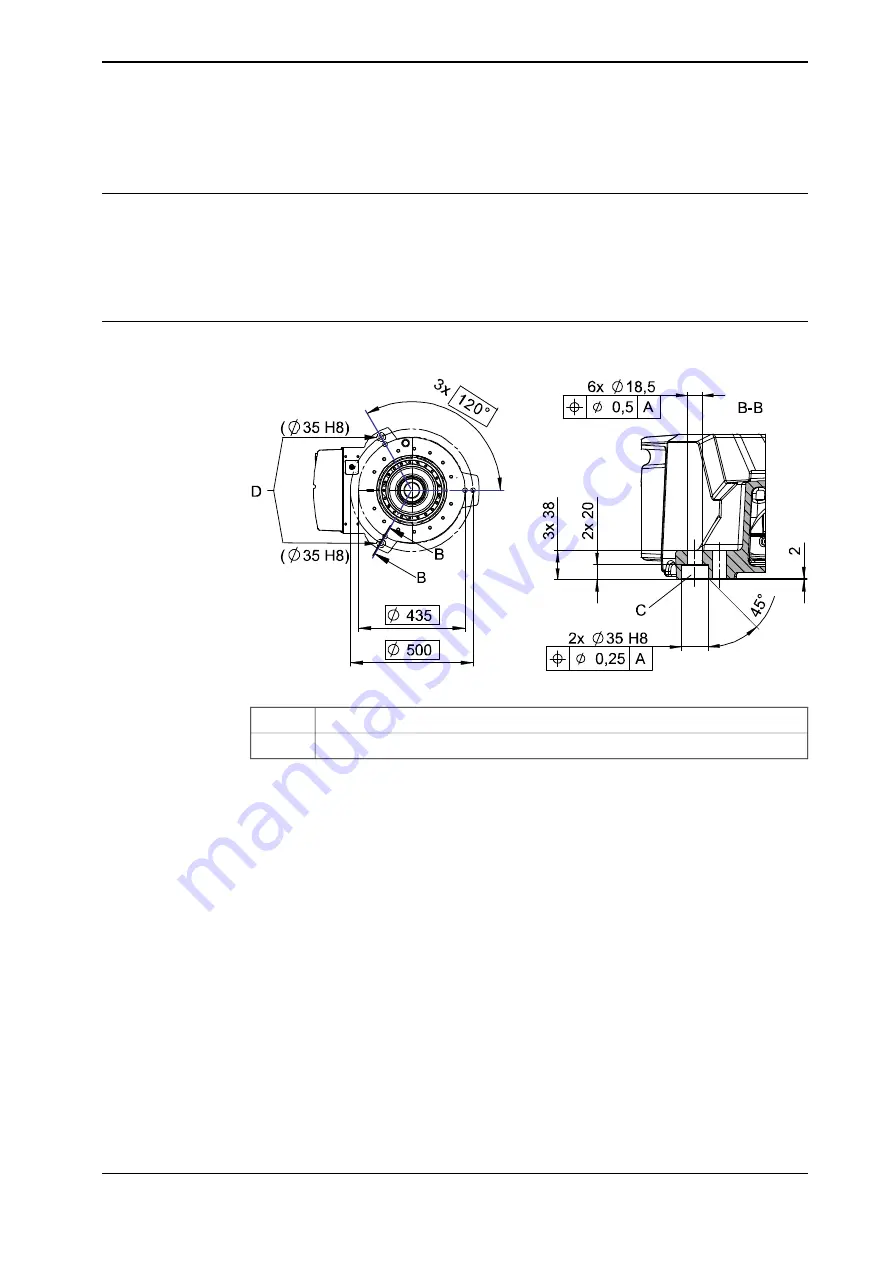
Hole configuration, base
The illustration shows the hole configuration used when securing the robot.
xx0800000271
Hole for guide bushing
C
Rear bolt holes
D
Continues on next page
Product manual - IRB 4600
61
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
2 Installation and commissioning
2.3.4 Orienting and securing the robot
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......




































































