





























2.7 Robot in cold environments
2.7.1 Start of robot in cold environments
Introduction
This section describes how to start the robot in a cold environment if it is not starting
the normal way.
Problems with starting the robot
Event message from Motion Supervision
Use this procedure if an event message indicates a problem with Motion supervision
at start-up. More information about Motion Supervision is found in
Technical
reference manual - System parameters
.
Note
Action
Turn off Motion Supervision.
1
Start the robot.
2
When the robot has reached normal working temper-
ature, the Motion Supervision can be turned on
again.
3
Robot stopping with other event message
Use this procedure if the robot is not starting.
Note
Action
The speed can be regulated with the
RAPID instruction
VelSet
.
Start the robot with its normal program but
with reduced speed.
1
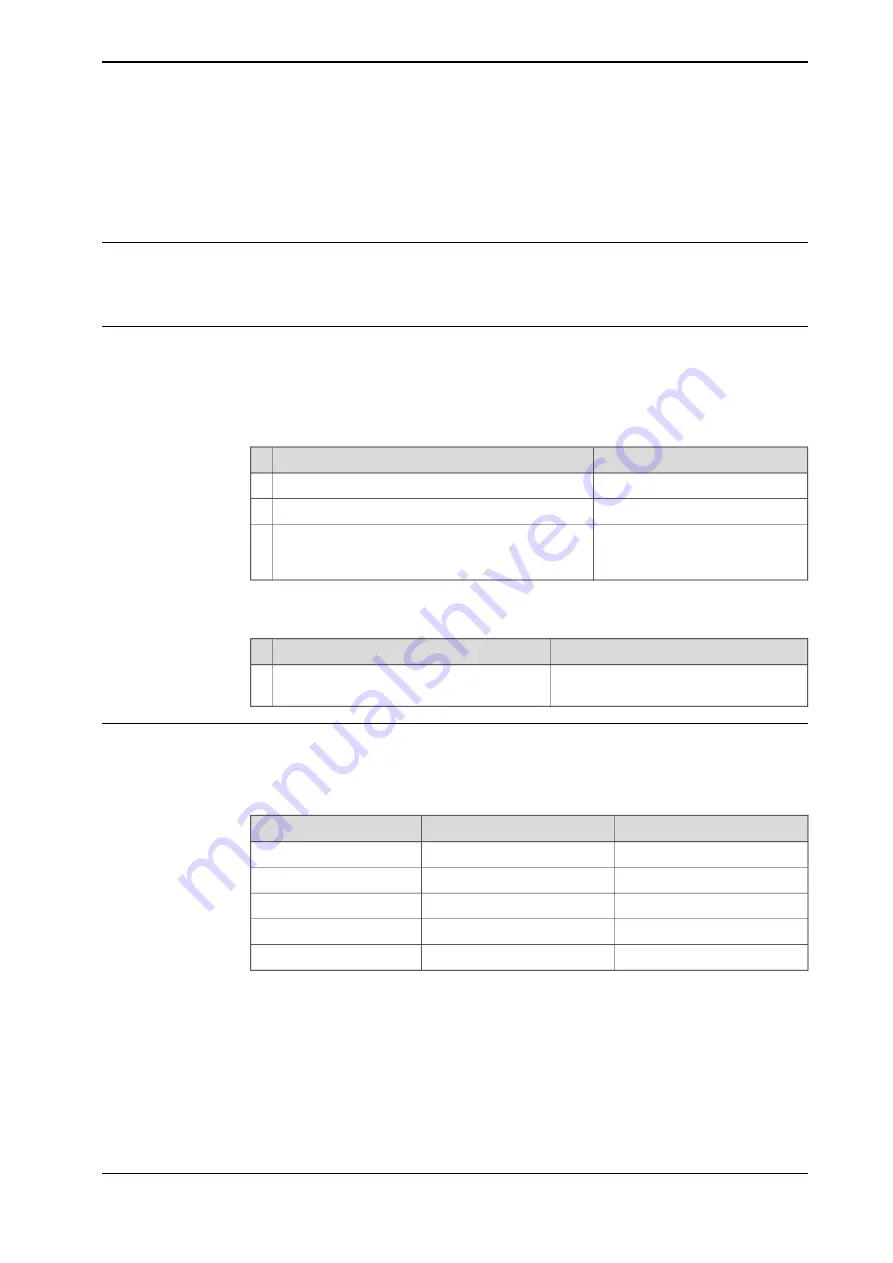
Adjusting the speed and acceleration during warm-up
Depending on how cold the environment is and what program is being used, the
speed might need to be ramped up until reached maximum. The table shows
examples of how to adjust the speed:
Speed/velocity
AccSet
Work cycles
v100 (100 mm/s)
20, 20
3 Work cycles
v400 (400 mm/s)
40, 40
5 Work cycles
v600 (600 mm/s)
60, 60
5 Work cycles
v1000 (1000 mm/s)
100, 100
5 Work cycles
Max.
100, 100
More than 5 Work cycles
If the program consists of large wrist movements, it is possible that the reorientation
velocity, which is always high in predefined velocities, needs to be included in the
ramping up.
Product manual - IRB 4600
95
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
2 Installation and commissioning
2.7.1 Start of robot in cold environments
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......







































































