





























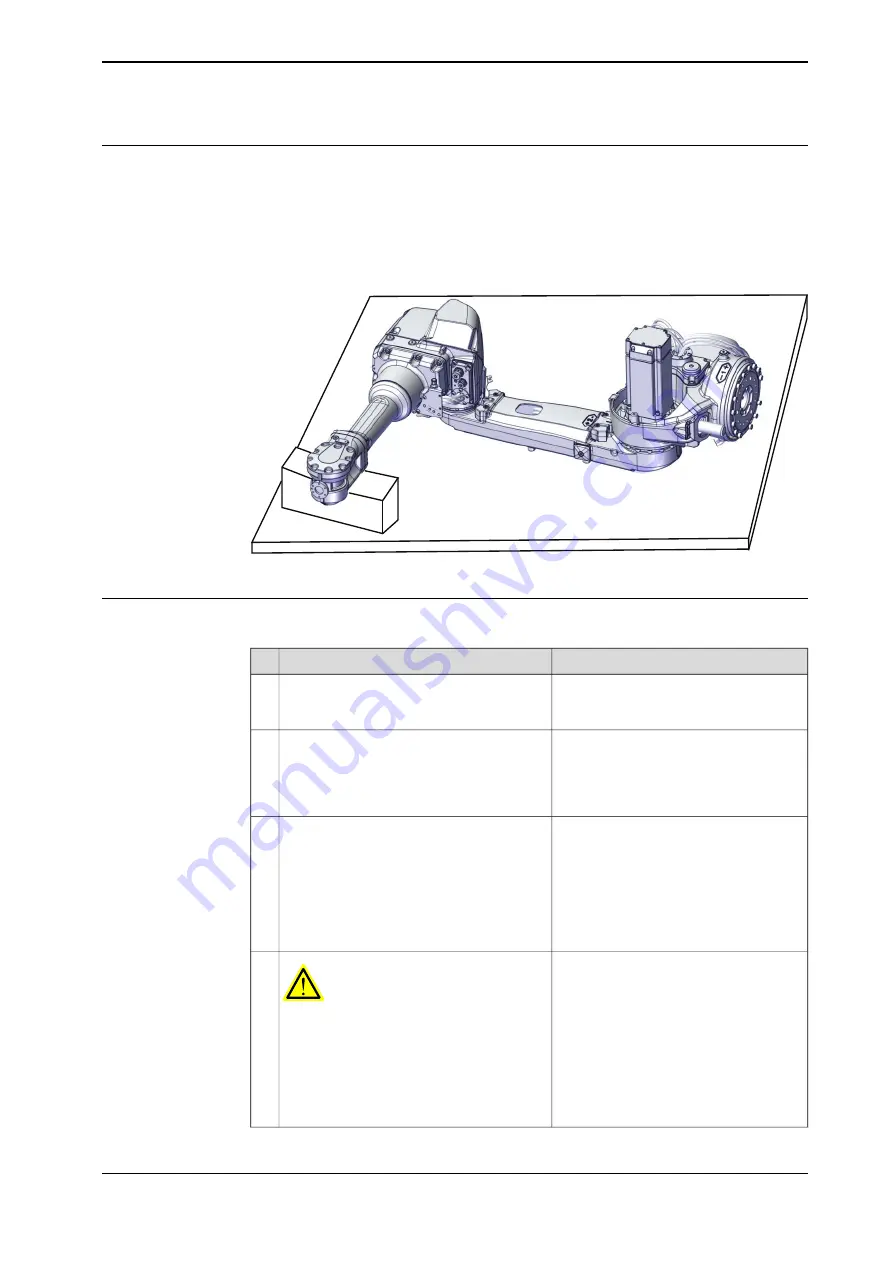
Illustration of robot put down on its side
The robot is put down on its side for a safe removal of the axis-1 gearbox. Prepare
an area on the floor with cardboard, plastic foam or similar and prepare higher
support for the wrist.
Make sure the cabling brackets on the lower arm are unfastened and moved out
of the way so that the cabling is not getting squeezed.
xx1800000593
Removing gearbox axis 1
Use this procedure to remove the gearbox.
Note
Action
Decide which calibration routine to use, and
take actions accordingly prior to beginning
the repair procedure.
1
How to drain the oil from the gearbox is
described in section:
•
Changing the oil, axis-1 gearbox
on floor mounted robots on
page 146
Drain the oil from the gearbox.
2
Jog the robot to:
•
Axis 1: 0
°
•
Axis 2: 0°
•
Axis 3: -10°
•
Axis 4: 0°
•
Axis 5: 0°
•
Axis 6: 0°
3
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the safeguarded
space.
4
Continues on next page
Product manual - IRB 4600
309
3HAC033453-001 Revision: Y
© Copyright 2009-2021 ABB. All rights reserved.
4 Repair
4.8.1 Replacing gearbox axis 1
Continued
Summary of Contents for IRB 4600
Page 1: ...ROBOTICS Product manual IRB 4600 ...
Page 8: ...This page is intentionally left blank ...
Page 334: ...This page is intentionally left blank ...
Page 368: ...This page is intentionally left blank ...
Page 376: ...This page is intentionally left blank ...
Page 390: ...This page is intentionally left blank ...
Page 392: ...This page is intentionally left blank ...
Page 398: ......
Page 399: ......







































































