





























Note
Action
Tightening torque: 10 Nm.
xx1300000772
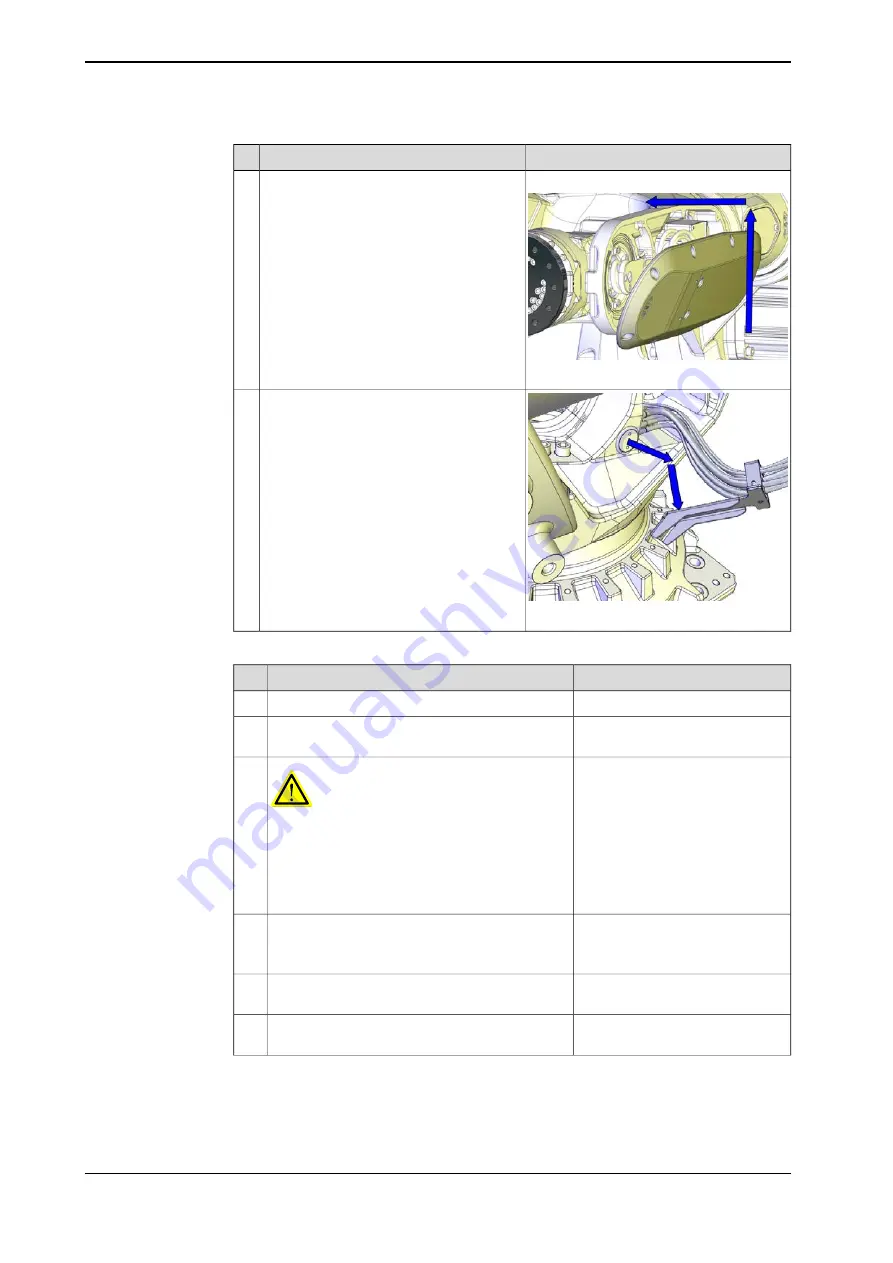
Use caution in order not to damage the
cable harness when the wrist cover is refit-
ted, by following this method:
1
Hold the cover tilted. See figure!
2
Put the cable harness on the cover.
3
Lift the cover, still tilted.
4
Move the upper part of the cover into
position.
5
Secure the cover with its attachment
screws.
8
xx1200001184
Refit the bracket to the frame.
9
Refitting the front shaft of the balancing device
Note
Action
Turn the power to the robot on temporarily.
1
Use caution and jog the robot to the calibration
position (if not already done).
2
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
to the robot, before entering the robot working
area.
3
Lifting shackle: SA-10-8-NA1
Apply the lifting accessory to the balancing device
(if not already done).
4
Lifting accessory (chain):
3HAC15556-1
Remove all residue of Loctite in the screw hole of
the shaft.
5
Wipe all contact surfaces inside the recess clean
from contamination.
6
Continues on next page
362
Product manual - IRB 6790
3HAC063331-001 Revision: B
© Copyright 2019 - 2020 ABB. All rights reserved.
4 Repair
4.5.4 Replacing the lower arm
Continued
Summary of Contents for IRB 6790
Page 1: ...ROBOTICS Product manual IRB 6790 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 164: ...This page is intentionally left blank ...
Page 612: ...This page is intentionally left blank ...
Page 638: ...This page is intentionally left blank ...
Page 644: ...This page is intentionally left blank ...
Page 658: ...This page is intentionally left blank ...
Page 660: ...This page is intentionally left blank ...
Page 667: ......







































































