





























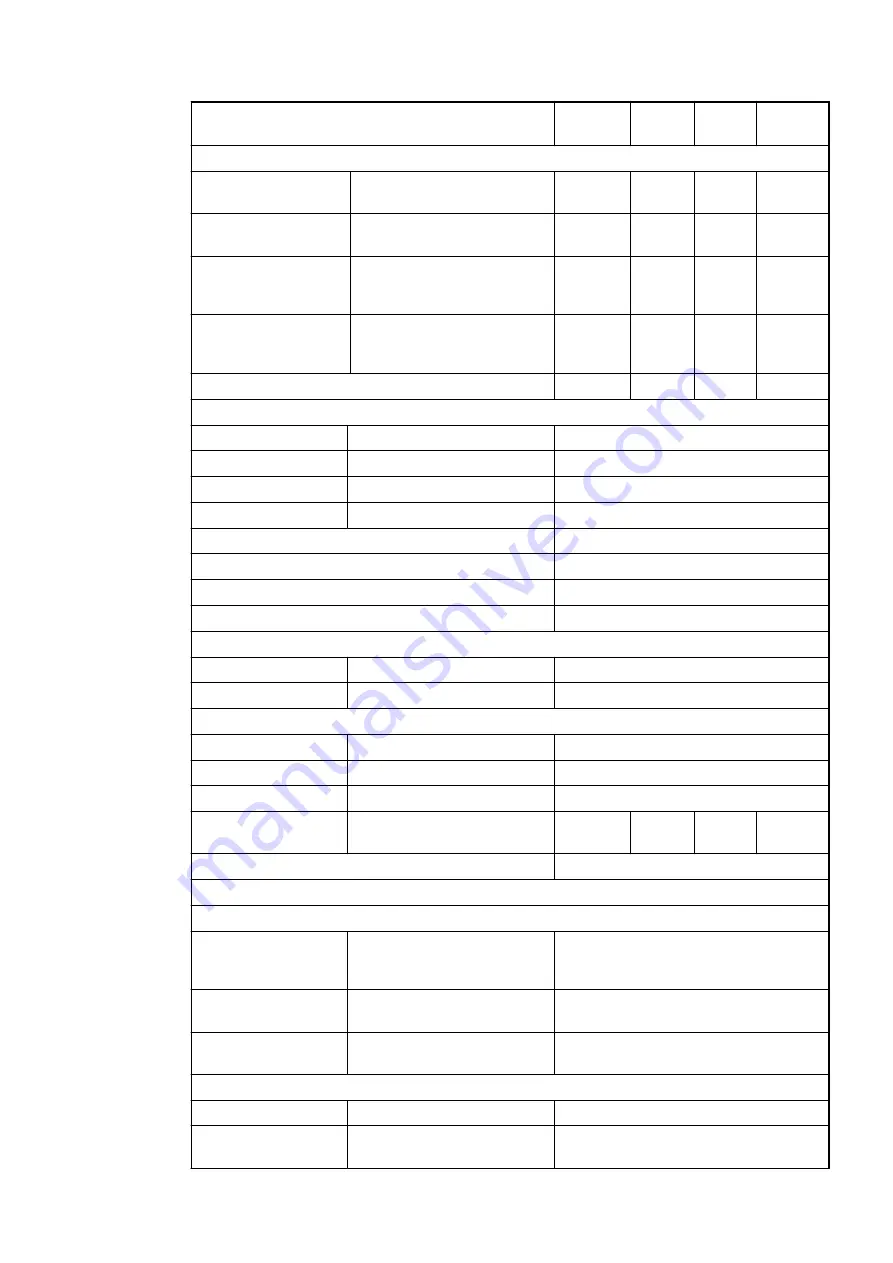
Processor module
PM5630
PM565
0
PM567
0
PM5675
Motion capability
No. synchronized axis per 1
ms on EtherCAT CM typically
-
8*
16*
16*
No. synchronized axis per 2
ms on EtherCAT CM typically
4*
16*
>32
>32
No. synchronized axis per
4 ms on EtherCAT CM or
CANopen onboard typically
8*
>32
>32
>32
Min. bus cycle time for
EtherCAT using external
CM579
2 ms
1 ms
0,5 ms
0,5 ms
* in addition: 1 virtual axis
Max. number of central inputs and outputs (10 exp. modules):
Digital inputs
320
Digital outputs
320
Analog inputs
160
Analog outputs
160
Number of decentralized inputs and outputs
Depends on the used fieldbus
Data backup
Battery
Data buffering time at 25
°
C
Typ. 3 years
Battery low indication
via application program
Real-time clock:
With battery backup
x
Accuracy
Typ.
±
2 s / day at 25 °C
Program execution:
Cyclic
x
Time-controlled
x
Multitasking
x
Minimum cycle time configu-
rable for cyclical task
1 ms
1 ms
0,5 ms
0,5 ms
User program protection by password
x (user management)
Internal interfaces for communication:
Serial interface COM1:
Physical link
Configurable for RS-232 or RS-485 (9.6
kb/s, 19.2 kb/s, 38.4 kb/s, 57.6 kb/s and
115.2 kb/s)
Connection
Pluggable terminal block, spring con-
nection
Usage
Serial ASCII communication,Modbus
RTU
CAN interface:
Physical link
CAN 2A/2B (from 50 kb/s to 1 Mb/s)
Connection
Pluggable terminal block, spring con-
nection
Device specifications
Processor modules > AC500 (standard)
2022/01/31
3ADR010278, 3, en_US
96



































































