




























1-152
ACH550-UH User’s Manual
Parameters
4002
INTEGRATION TIME
0.0…3600.0 s
0.1 s
3.0 s
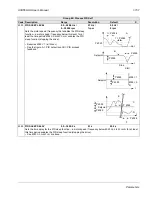
Defines the PID controller’s integration time.
Integration time is, by definition, the time required to increase the
output by the error value:
• Error value is constant and 100%.
• Gain = 1.
• Integration time of 1 second denotes that a 100% change is
achieved in 1 second.
0.0 =
NOT
SEL
– Disables integration (I-part of controller).
0.1…3600.0 – Integration time (seconds).
• See 4001 for adjustment procedure.
4003
DERIVATION TIME
0.0…10.0 s
0.1 s
0.0 s
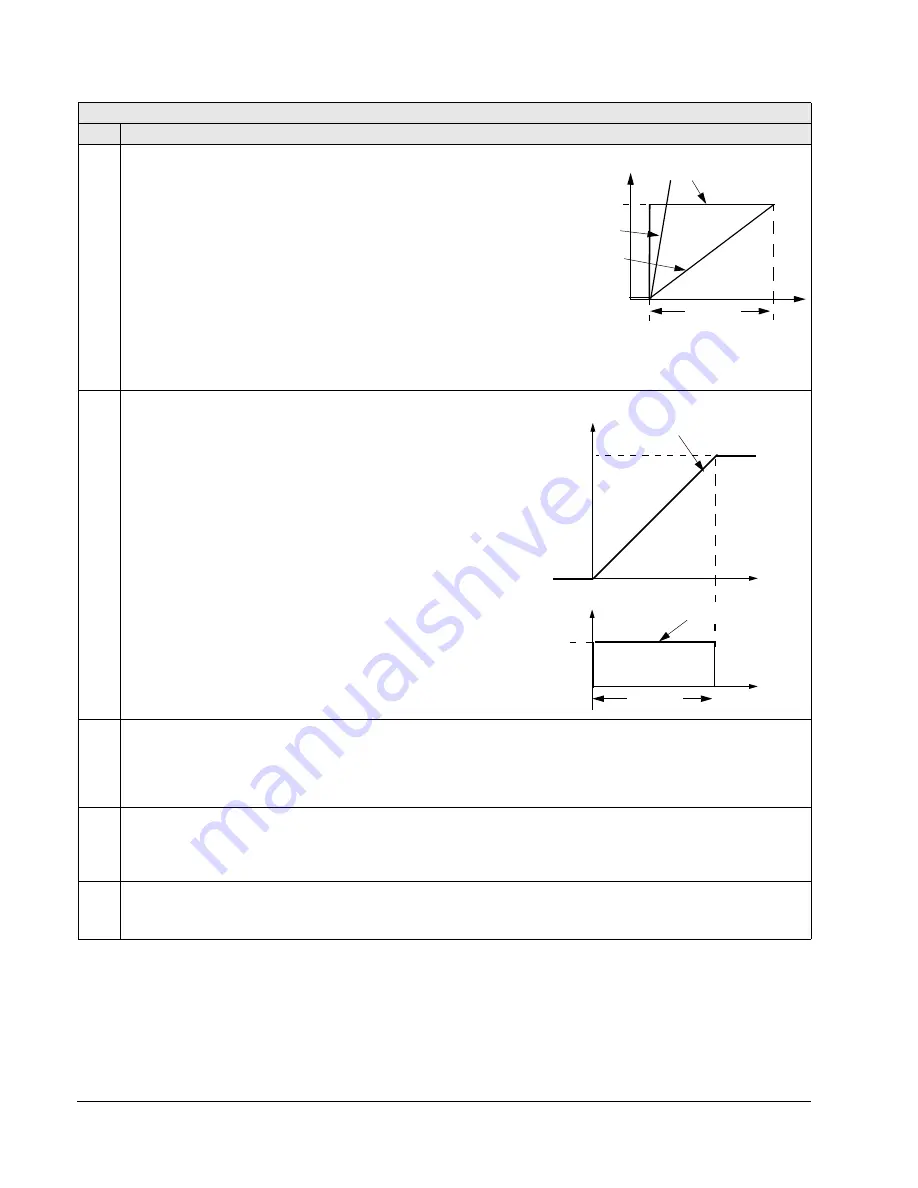
Defines the PID controller’s derivation time.
• You can add the derivative of the error to the PID controller
output. The derivative is the error value’s rate of change. For
example, if the process error value changes linearly, the
derivative is a constant added to the PID controller output.
• The error-derivative is filtered with a 1-pole filter. The time
constant of the filter is defined by parameter 4004
PID
DERIV
FILTER
.
0.0…10.0 – Derivation time (seconds).
4004
PID DERIV FILTER
0.0…10.0 s
0.1 s
1.0 s
Defines the filter time constant for the error-derivative part of the PID controller output.
• Before being added to the PID controller output, the error-derivative is filtered with a 1-pole filter.
• Increasing the filter time smooths the error-derivative, reducing noise.
0.0…10.0 – Filter time constant (seconds).
4005
ERROR VALUE INV
0, 1
1
0 (
NO
)
Selects either a normal or inverted relationship between the feedback signal and the drive speed.
0 =
NO
– Normal, a decrease in feedback signal increases drive speed. Error = Ref - Fbk
1 =
YES
– Inverted, a decrease in feedback signal decreases drive speed. Error = Fbk - Ref
4006
UNITS
0…127
1
4 (%)
Selects the unit for the PID controller actual values. (PID1 parameters 0128, 0130 and 0132).
• See parameter 3405 for list of available units.
Group 40: Process PID Set 1
Code Description Range
Resolution
Default
S
P 4002
A
C (P 4001 = 1)
B
A = Error
B = Error value step
C = Controller output with Gain = 1
D = Controller output with Gain = 10
D (P 4001 = 10)
t
100%
Gain
Process error value
P 4003
D-part of controller output
PID output
Error
0%
P 4001
t
t
Summary of Contents for ACH550-BCR
Page 4: ...iv Manual contents ...
Page 6: ......
Page 12: ...1 8 ACH550 UH User s Manual Table of contents ...
Page 36: ...1 32 ACH550 UH User s Manual Installation ...
Page 70: ...1 66 ACH550 UH User s Manual Application macros ...
Page 335: ...ACH550 UH User s Manual 1 331 Technical data ...
Page 348: ......
Page 382: ...2 36 ACH550 E Clipse Bypass User s Manual Start up ...
Page 398: ...2 52 ACH550 E Clipse Bypass User s Manual Bypass functions overview ...
Page 406: ...2 60 ACH550 E Clipse Bypass User s Manual Application macros ...
Page 544: ...2 198 ACH550 E Clipse Bypass User s Manual Embedded fieldbus ...
Page 584: ...2 238 ACH550 E Clipse Bypass User s Manual Diagnostics ...
Page 608: ......
Page 612: ...3 6 ACH550 UH User s Manual Table of contents ...
Page 622: ...3 16 ACH550 PCR PDR User s Manual Installation ...
Page 641: ......







































































