





























Parameters 191
Shows value of process PID setpoint after source
selection, mathematical function limitation and
ramping.
This parameter is read-only.
-
-200000.00...
200000.00
Setpoint for process PID controller.
1 = 1
Shows process PID deviation. By default, this
value equals setpoint - feedback, but deviation
can be inverted by parameter
.
This parameter is read-only.
-
-200000.00...
200000.00
PID deviation.
1 = 1
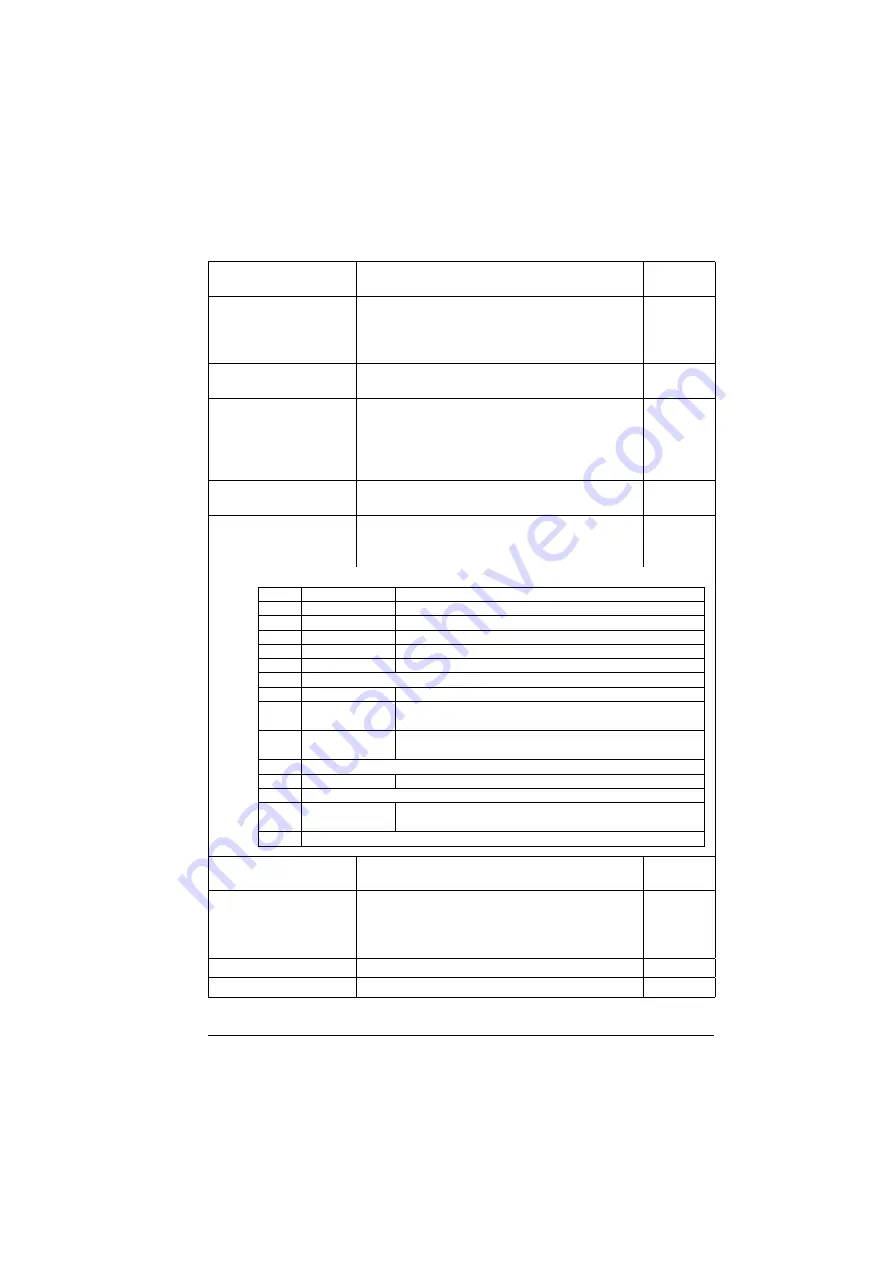
Shows status information on process PID
control.
This parameter is read-only.
0b0000
0b0000…
0b1111
Process PID control status word.
1 = 1
Activates/deactivates process PID control.
Note:
Process PID control is only available in
external control; see section
(page
).
Off
Process PID control inactive.
0
On
Process PID control active.
1
No.
Name/Value
Description
Def/
FbEq16
Bit
Name
Value
0
PID active
1 = Process PID control active.
1
Setpoint frozen 1 = Process PID setpoint frozen.
2
Output frozen 1 = Process PID controller output frozen.
3
PID sleep mode 1 = Sleep mode active.
4
Sleep boost
1 = Sleep boost active.
5
Reserved
6
Tracking mode 1 = Tracking function active.
7
Output limit
high
1 = PID output is being limited by par.
.
8
Output limit
low
1 = PID output is being limited by par.
.
9
Reserved
10
PID set
0 = Parameter set 1 in use. 1 = Parameter set 2 in use.
11
Reserved
12
Internal
setpoint active
1 = Internal setpoint active (see par.
…
)
13…15 Reserved
Summary of Contents for ACQ80
Page 1: ... ABB DRIVES FOR WATER ACQ80 standard program control Firmware manual ...
Page 2: ... Related documents are listed on page 13 ...
Page 4: ......
Page 10: ...10 Table of contents ...
Page 32: ...32 Startup control with I O and ID run ...
Page 34: ...34 Using the control panel ...
Page 74: ...74 Program features ...
Page 78: ...78 Control macros ...
Page 380: ...380 Fieldbus control through a fieldbus adapter ...
Page 384: ...384 Parameterization with Drive Composer ...
Page 388: ...388 Parameterization with Automation builder drive manager ...







































































