





























54 Program features
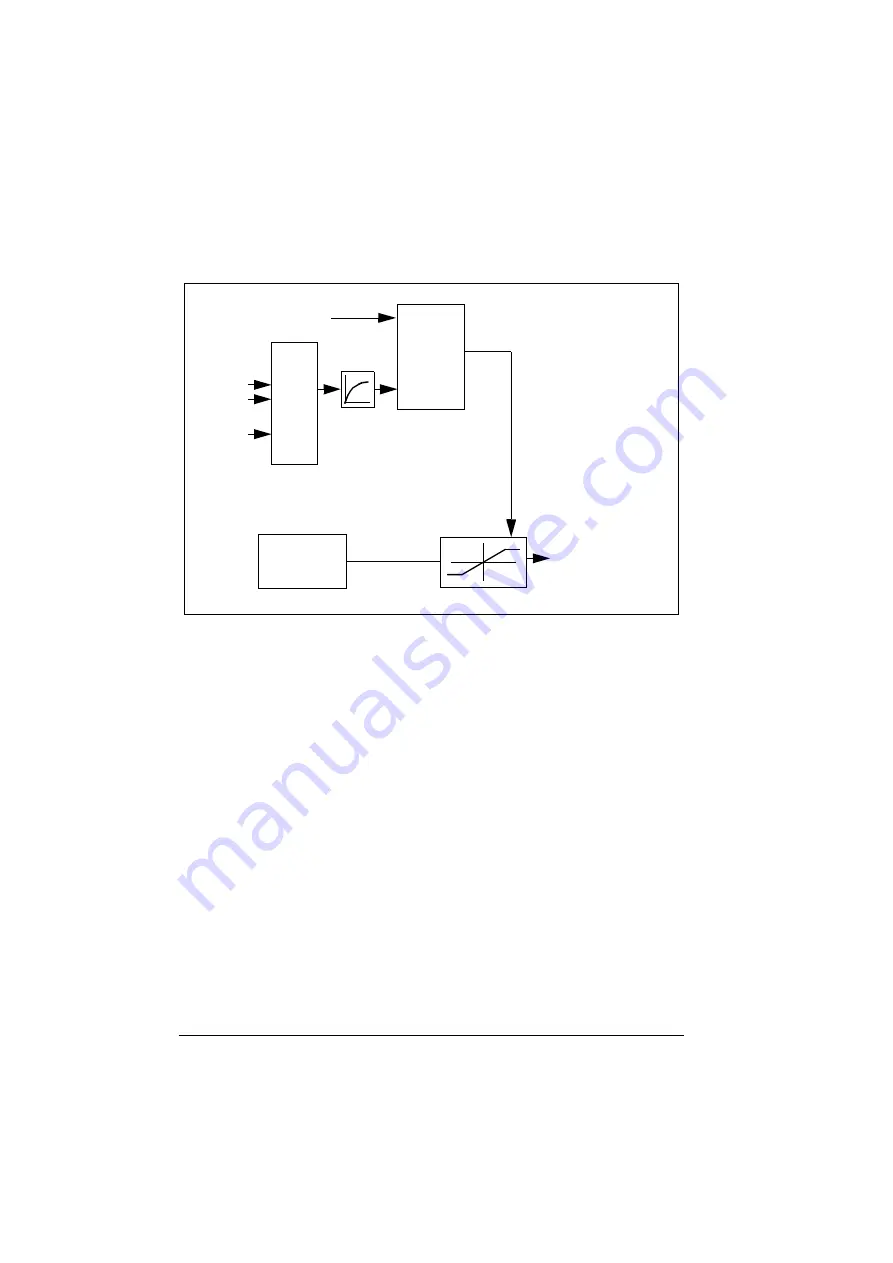
The simplified block diagram below illustrates the process PID control.
Note:
When PID is enabled, the PID output generated by the PID set 1 (
) is
used as a reference limiter for speed/frequency reference generated from
MPPT algorithm.
Tracking
In tracking mode, the PID block output is set directly to the value of parameter
. The internal I term of the PID controller is set so
that no transient is allowed to pass on to the output, so when the tracking
mode is left, normal process control operation can be resumed without a
significant bump.
Settings
•
Menu - Primary settings - PID - PID output
• Parameter groups
(page
).
Motor control
Motor types
The drive supports asynchronous AC induction and permanent magnet (PM)
motors.
Process
PID
AI1
Process
actual
values
AI2
• • •
FBA
Setpoint
MPPT
reference
Filter
Limitation
Final
speed/frequency
reference
Speed/
frequency
reference
Summary of Contents for ACQ80
Page 1: ... ABB DRIVES FOR WATER ACQ80 standard program control Firmware manual ...
Page 2: ... Related documents are listed on page 13 ...
Page 4: ......
Page 10: ...10 Table of contents ...
Page 32: ...32 Startup control with I O and ID run ...
Page 34: ...34 Using the control panel ...
Page 74: ...74 Program features ...
Page 78: ...78 Control macros ...
Page 380: ...380 Fieldbus control through a fieldbus adapter ...
Page 384: ...384 Parameterization with Drive Composer ...
Page 388: ...388 Parameterization with Automation builder drive manager ...







































































