





























ACS 160 User’s Manual
45
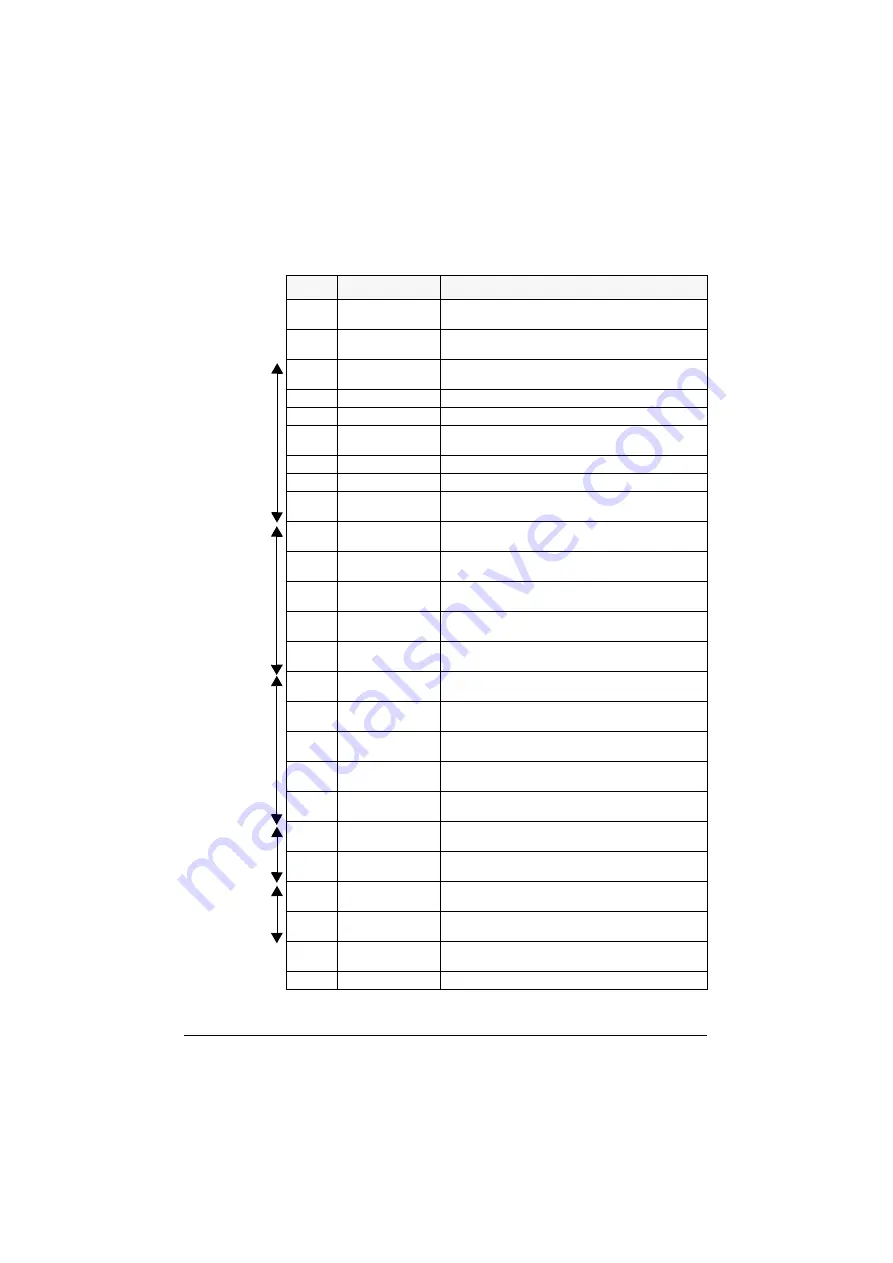
Parameter Guide
Group
Name
Description
99
Start-up Data
Parameter settings for setting up the drive and for
entering motor information.
01
Operating Data
Read only parameters for drive operation data, including
actual signals and fault memories.
10
Command Inputs
Parameter settings for start, stop and direction
commands.
11
Reference Select
Parameter settings for reference commands / locations.
12
Constant Speeds
Parameter settings for constant speed value input.
13
Analogue Input
Parameter settings for max, min and filter for the
analogue input.
14
Relay Outputs
Parameter settings for relay output characteristics.
15
Analogue Outputs
Parameter settings for analogue output.
16
System Controls
Parameter settings for enabling/disabling parameter
access, run enable etc.
20
Limits
Parameter settings for limiting operating features and
overvoltage control.
21
Start/Stop
Parameter settings for selecting start and stop modes,
flying start, torque boosting, DC hold, ramp coast etc.
22
Acc/Decel
Parameter settings for defining the two acceleration/
deceleration ramp pairs.
25
Critical Freq
Parameter settings for setting critical freq to avoid
resonance problems.
26
Motor Control
Parameter settings for selecting motor control features,
like IR compensation and low noise u/f ratio.
30
Fault Functions
Parameter settings for configuring desired response to
certain abnormal external conditions.
31
Automatic Reset
Parameter settings for automatically resetting some
faults.
32
Supervision
Parameter settings for any 2 parameters of group 01 to
be supervised in co-operation with relays.
33
Information
Read only parameters for information about the
software version and production date.
34
Process Variables
Parameter settings for creating custom process
variables.
40
PID Control
Parameter settings for the first set of PID Control
parameters.
41
PID Control (2)
Parameter settings for the second set of PID Control
parameters.
51
Ext Comm Module
Parameter settings for external fieldbus communication
modules.
52
Standard Modbus
Parameter settings for standard Modbus (serial
communication).
54
Braking
Parameter settings for selecting additional braking
features.
81
Positioning
Parameter settings for positioning applications.
Set-up
Operating
Configuration
Performance
Information
Supervision
PID
Fieldbus
Braking
Positioning
Summary of Contents for ACS 160
Page 2: ......
Page 4: ......
Page 10: ...viii ACS 160 User s Manual ...
Page 12: ...2 ACS 160 User s Manual ...
Page 32: ...22 ACS 160 User s Manual ...
Page 42: ...32 ACS 160 User s Manual ...
Page 56: ...46 ACS 160 User s Manual ...
Page 116: ...106 ACS 160 User s Manual ...
Page 122: ...112 ACS 160 User s Manual ...
Page 126: ...116 ACS 160 User s Manual ...
Page 136: ...126 ACS 160 User s Manual ...
Page 137: ......







































































