





























Actual signals and parameters 229
SPD COMP
REV
Speed compensation is used for constant distance braking if
the direction of rotation is reverse. Speed difference
(between used speed and maximum speed) is
compensated by running the drive with current speed before
the motor is stopped along a ramp. See section
Acceleration and deceleration ramps
on page
.
If the direction of rotation is forward, the drive is stopped
along a ramp.
5
2103 DC MAGN
TIME
Defines the pre-magnetizing time. See parameter
. After the start command, the drive
automatically pre-magnetizes the motor for the defined time.
0.30 s
0.00…10.00 s
Magnetizing time. Set this value long enough to allow full
motor magnetization. Too long a time heats the motor
excessively.
1 = 0.01 s
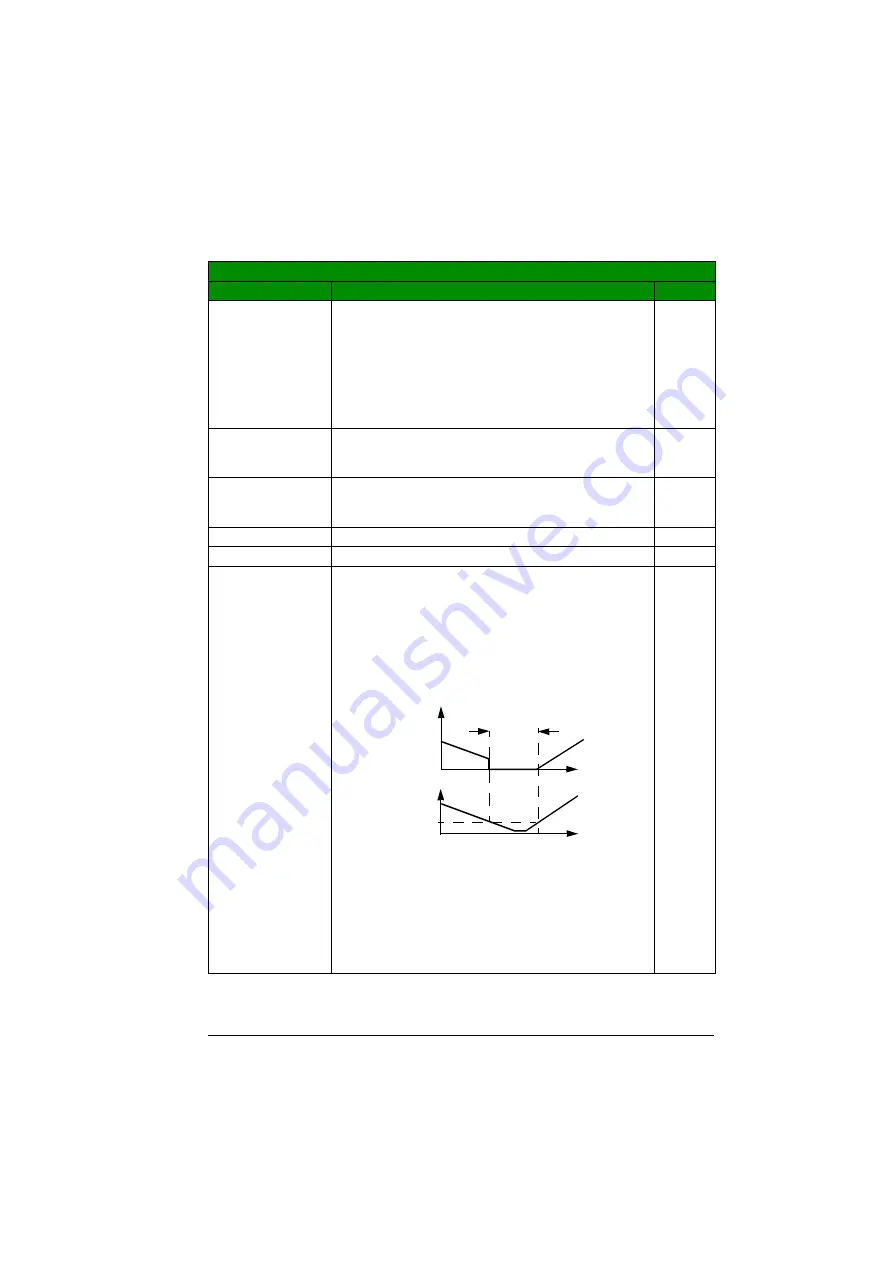
2104 DC HOLD CTL Activates the DC hold or DC braking function.
NOT SEL
Inactive
0
DC HOLD
DC hold function active. DC hold is not possible if parameter
When both the reference and the motor speed drop below
the value of parameter
, the drive
will stop generating sinusoidal current and start to inject DC
into the motor. The current is set by parameter
. When the reference speed exceeds parameter
value, normal drive operation continues.
Note:
DC hold has no effect if the start signal is switched
off.
Note:
Injecting DC current into the motor causes the motor
to heat up. In applications where long DC hold times are
required, externally ventilated motors should be used. If the
DC hold period is long, the DC hold cannot prevent the
motor shaft from rotating if a constant load is applied to the
motor.
1
All parameters
No.
Name/Value
Description
Def/FbEq
t
t
Motor speed
DC hold speed
Ref
DC hold
Summary of Contents for ACS355 series
Page 1: ...ABB machinery drives User s manual ACS355 drives ...
Page 4: ......
Page 16: ...16 ...
Page 32: ...32 Operation principle and hardware description ...
Page 58: ...58 Electrical installation ...
Page 74: ...74 Start up control with I O and ID run ...
Page 106: ...106 Control panels ...
Page 120: ...120 Application macros ...
Page 178: ...178 Program features ...
Page 338: ...338 Fieldbus control with embedded fieldbus ...
Page 368: ...368 Fault tracing ...
Page 404: ...404 Dimension drawings ...
Page 410: ...410 Appendix Resistor braking ...
Page 434: ...434 Appendix Permanent magnet synchronous motors PMSMs ...







































































