





























244 Actual signals and parameters
ON (LOAD)
The drive is started with 4 kHz switching frequency to gain
maximum output during the start. After start-up, the
switching frequency is controlled towards the selected value
(parameter
) if the output
current or the temperature allows.
This selection provides adaptive switching frequency
control. Adaptation decreases the output performance in
some cases.
2
LONG CABLE
Fixes switching frequency to 4 kHz and prolongs the
minimum pulse time enabling the use of longer cables.
3
2608 SLIP COMP
RATIO
Defines the slip gain for the motor slip compensation
control. 100% means full slip compensation, 0% means no
slip compensation. Other values can be used if a static
speed error is detected despite the full slip compensation.
Can be used only in scalar control (ie, when parameter
setting is
Example:
35 Hz constant speed reference is given to the
drive. Despite the full slip compensation (
= 100%), a manual tachometer measurement from
the motor axis gives a speed value of 34 Hz. The static
speed error is 35 Hz - 34 Hz = 1 Hz. To compensate the
error, the slip gain should be increased.
0%
0…200%
Slip gain
1 = 1%
All parameters
No.
Name/Value
Description
Def/FbEq
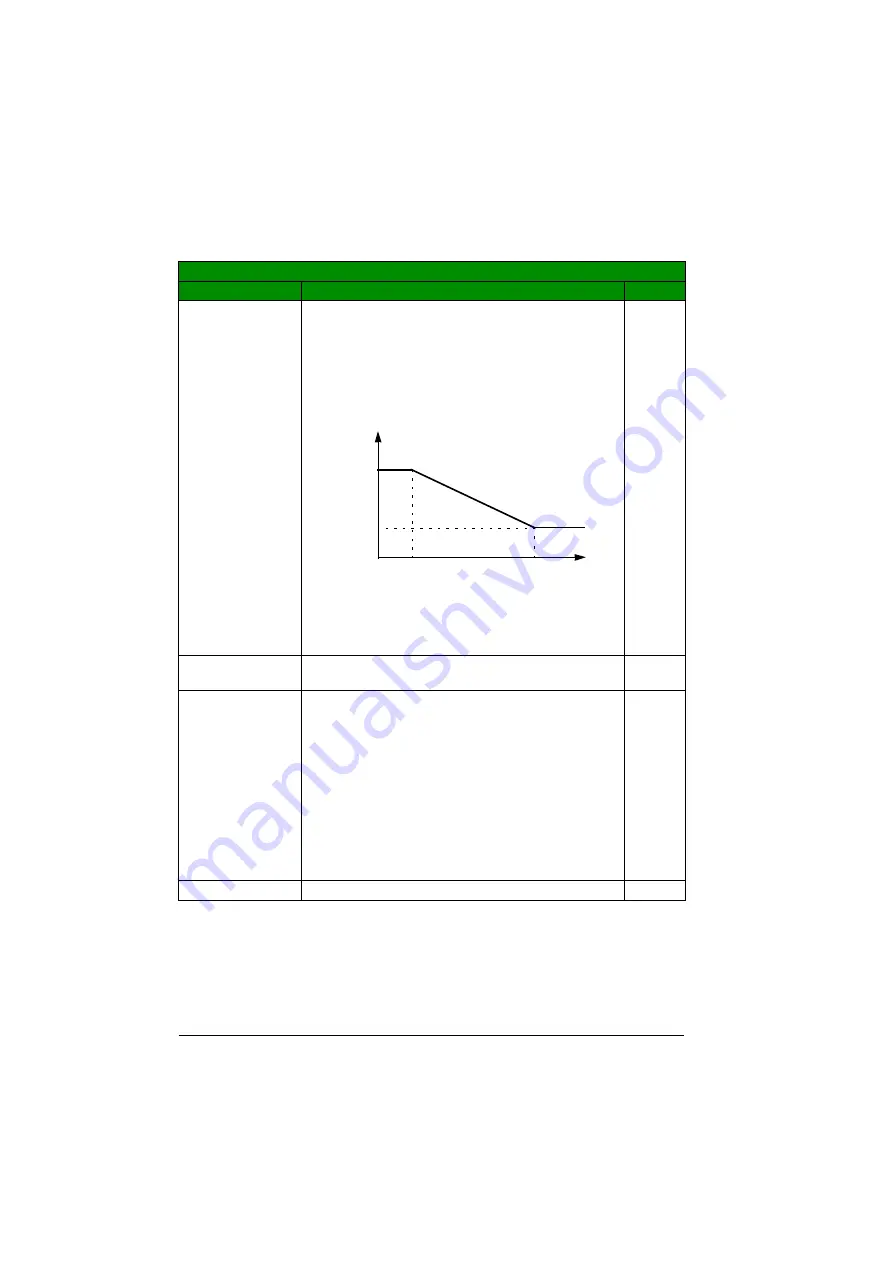
* Temperature depends on the drive output frequency.
** Short term overloading is allowed with each switching
frequency depending on actual loading.
16 kHz
4 kHz
Drive current
I
2N
Drive
temperature
f
sw
limit
80…100 °C *
100…120 °C *
T
50% **
100% **
Summary of Contents for ACS355 series
Page 1: ...ABB machinery drives User s manual ACS355 drives ...
Page 4: ......
Page 16: ...16 ...
Page 32: ...32 Operation principle and hardware description ...
Page 58: ...58 Electrical installation ...
Page 74: ...74 Start up control with I O and ID run ...
Page 106: ...106 Control panels ...
Page 120: ...120 Application macros ...
Page 178: ...178 Program features ...
Page 338: ...338 Fieldbus control with embedded fieldbus ...
Page 368: ...368 Fault tracing ...
Page 404: ...404 Dimension drawings ...
Page 410: ...410 Appendix Resistor braking ...
Page 434: ...434 Appendix Permanent magnet synchronous motors PMSMs ...







































































