





























Actual signals and parameters 185
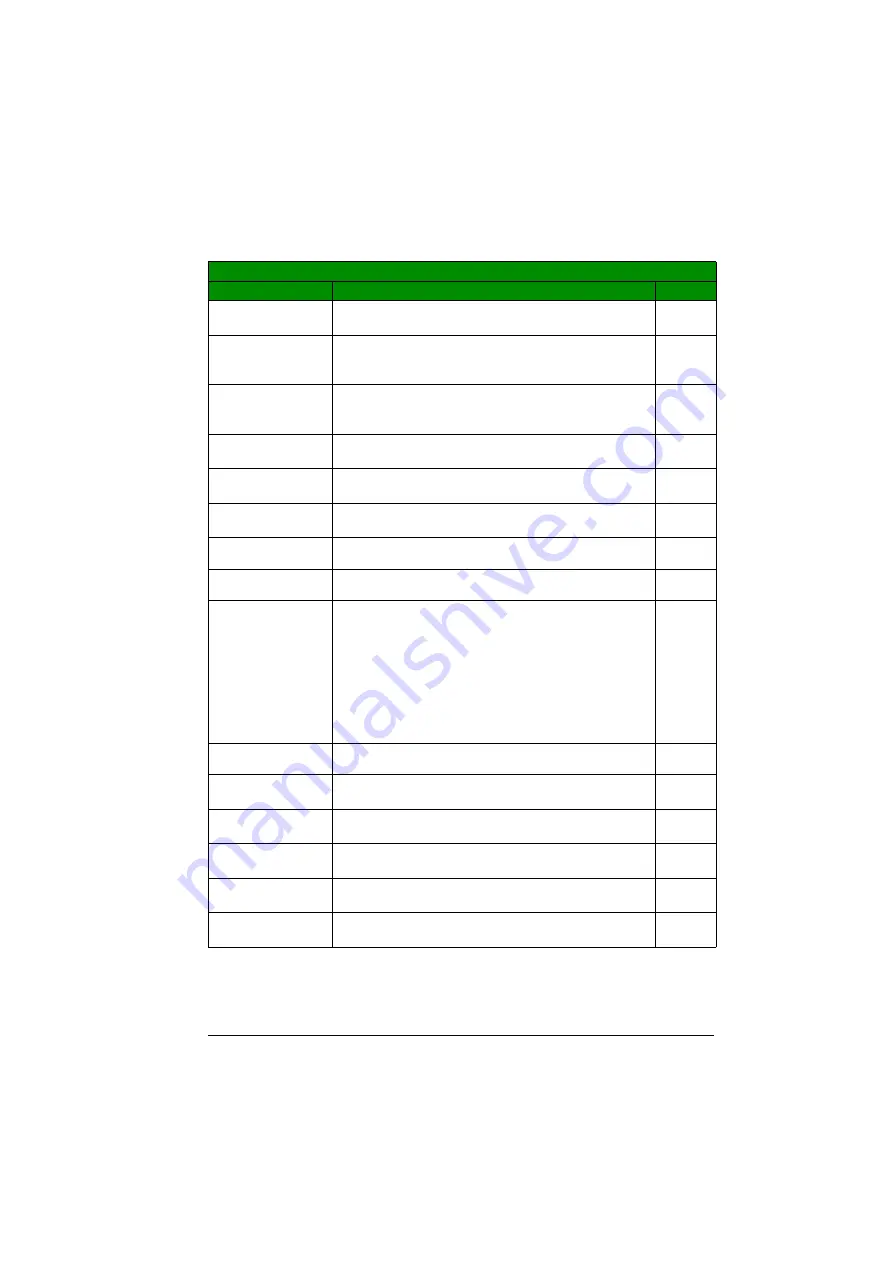
0144 DRIVE ON
TIME LO
Drive control board power-on time in 2 second ticks (30
ticks = 60 seconds). Counter cannot be reset.
1 = 2 s
0145 MOTOR TEMP Measured motor temperature. Unit depends on the sensor
parameters.
1 = 1
0146 MECH ANGLE Calculated mechanical angle. 1 = 5001 PULSE NR. The
signal indicates the angle as a percentage of the number of
pulses per revolution.
1 = 1
0147 MECH REVS
Mechanical revolutions, ie, the motor shaft revolutions
calculated by the encoder. Overflow is not prevented.
1 = 1
0148 Z PLS
DETECTED
Encoder zero pulse detector. 0 = NOT DETECTED, 1 =
DETECTED.
1 = 1
0150 CB TEMP
Temperature of the drive control board in degrees Celsius
(0.0…150.0 °C).
1 = 0.1 °C
0158 PID COMM
VALUE 1
Data received from fieldbus for PID control (PID1 and PID2) 1 = 1
0159 PID COMM
VALUE 2
Data received from fieldbus for PID control (PID1 and PID2) 1 = 1
0160 DI 1-5 STATUS Status of digital inputs.
Example (panel):
• 10000 = DI1 is on, DI2…DI5 are off.
• 10010 = DI1 and DI4 are on, DI2, DI3 and DI5 are off.
Example (DWL2):
• 16 (decimal) = DI1 is on, DI2…DI5 are off.
• 18 (decimal) = DI1 and DI4 are on, DI2, DI3 and DI5 are
off.
0161 PULSE INPUT
FREQ
Value of frequency input in Hz
1 = 1 Hz
0162 RO STATUS
Status of relay output 1. 1 = RO is energized, 0 = RO is de-
energized.
1 = 1
0163 TO STATUS
Status of transistor output, when transistor output is used as
a digital output.
1 = 1
0164 TO
FREQUENCY
Transistor output frequency, when transistor output is used
as a frequency output.
1 = 1 Hz
0165 TIMER VALUE Timer value of timed start/stop. See parameter group
1 = 0.01 s
0166 COUNTER
VALUE
Pulse counter value of counter start/stop. See parameter
group
1 = 1
Actual signals
No.
Name/Value
Description
FbEq
Summary of Contents for ACS355 series
Page 1: ...ABB machinery drives User s manual ACS355 drives ...
Page 4: ......
Page 16: ...16 ...
Page 32: ...32 Operation principle and hardware description ...
Page 58: ...58 Electrical installation ...
Page 74: ...74 Start up control with I O and ID run ...
Page 106: ...106 Control panels ...
Page 120: ...120 Application macros ...
Page 178: ...178 Program features ...
Page 338: ...338 Fieldbus control with embedded fieldbus ...
Page 368: ...368 Fault tracing ...
Page 404: ...404 Dimension drawings ...
Page 410: ...410 Appendix Resistor braking ...
Page 434: ...434 Appendix Permanent magnet synchronous motors PMSMs ...







































































