





























116
ACS510 User’s Manual
Start-Up
4002
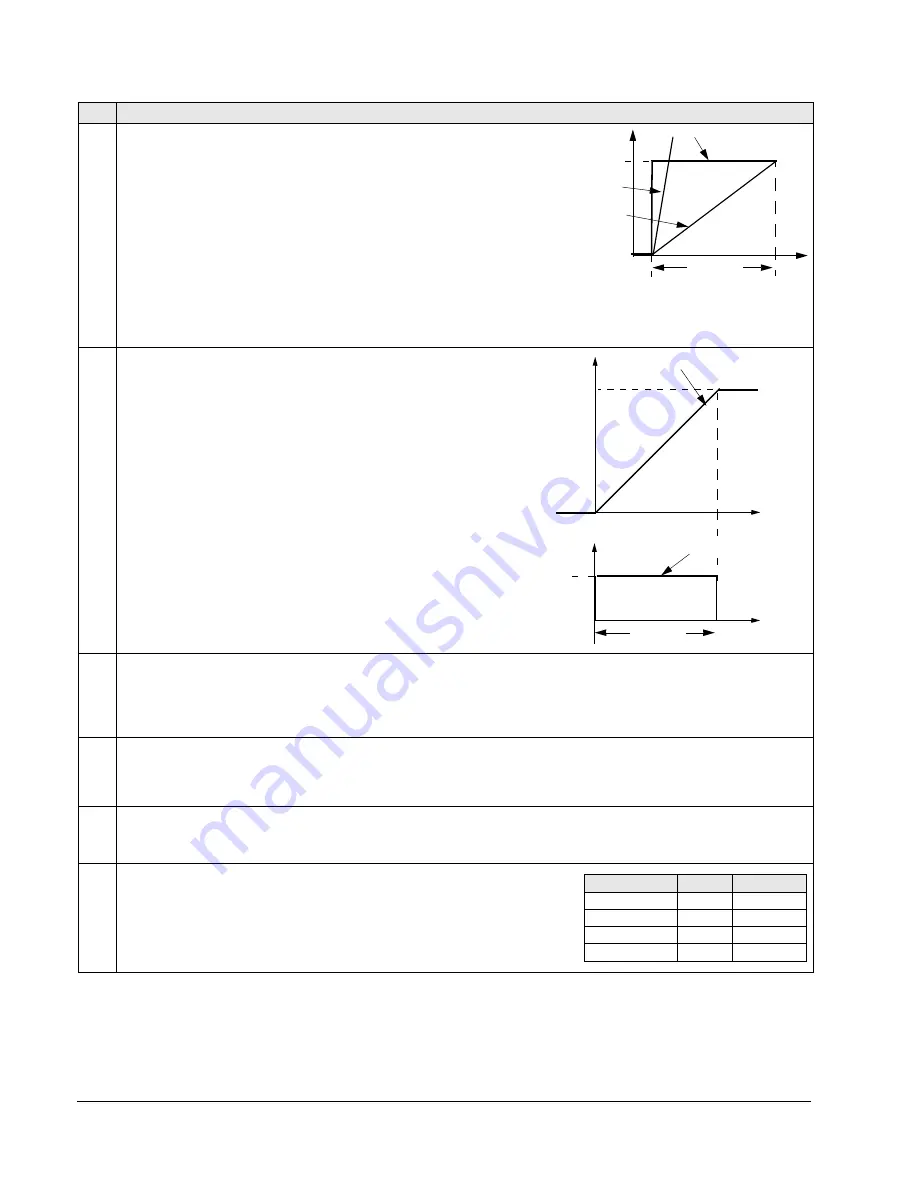
INTEGRATION TIME
Defines the PID Controller’s integration time.
Integration time is, by definition, is the time required to increase
the output by the error value:
• Error value is constant and 100%.
• Gain = 1.
• Integration time of 1 second denotes that a 100% change is
achieved in 1 second.
0.0 =
NOT
SEL
– Disables integration (I-part of controller).
0.1…3600.0 = Integration time (seconds).
See 4001 for adjustment procedure.
4003
DERIVATION TIME
Defines the PID Controller’s derivation time.
• You can add the derivative of the error to the PID controller
output. The derivative is the error value’s rate of change. For
example, if the process error value changes linearly, the
derivative is a constant added to the PID controller output.
• The error-derivative is filtered with a 1-pole filter. The time
constant of the filter is defined by parameter 4004
PID
DERIV
FILTER
.
0.0…10.0 – Derivation time (seconds)
4004
PID DERIV FILTER
Defines the filter time constant for the error-derivative part of the PID controller output.
• Before being added to the PID controller output, the error-derivative is filtered with a 1-pole filter.
• Increasing the filter time smooths the error-derivative, reducing noise.
0.0…10.0 – Filter time constant (seconds).
4005
ERROR VALUE INV
Selects either a normal or inverted relationship between the feedback signal and the drive speed.
0 =
NO
– Normal, a decrease in feedback signal increases drive speed. Error = Ref - Fbk
1 =
YES
– Inverted, a decrease in feedback signal decreases drive speed. Error = Fbk - Ref
4006
UNITS
Selects the unit for the PID controller actual values. (PID1 parameters 0128, 0130, and 0132).
See parameter 3405 for list of available units.
4007
UNIT SCALE
Defines the decimal point location in PID controller actual values.
• Enter the decimal point location counting in from the right of the entry.
• See table for example using pi (3.14159).
Code Description
t
P 4002
A
C (P 4001 = 1)
B
A = Error
B = Error value step
C = Controller output with Gain = 1
D = Controller output with Gain = 10
D (P 4001 = 10)
t
100%
Gain
Process Error Value
P 4003
D-part of controller output
PID output
Error
t
0%
P 4001
4007 Value
Entry
Display
0
0003
3
1
0031
3.1
2
0314
3.14
3
3142
3.142
Supplied from China by: Guangzhou Tofee Electro Mechanical Equipment Co., Ltd
Email: info@tofee.com.cn







































































