





























ACS550-02/U2 User’s Manual
77
Control panels
Output mode
In the Output mode, you can:
• monitor actual values of up to three signals in
Group 01: OPERATING DATA
• change the direction of the motor rotation
• set the speed, frequency or torque reference
• adjust the display contrast
• start, stop, change the direction and switch between local and remote control.
You get to the Output mode by pressing
repeatedly.
The top right corner of the
display shows the reference
value. The center can be
configured to show up to three
signal values or bar graphs; see
page
80
for instructions on
selecting and modifying the monitored signals.
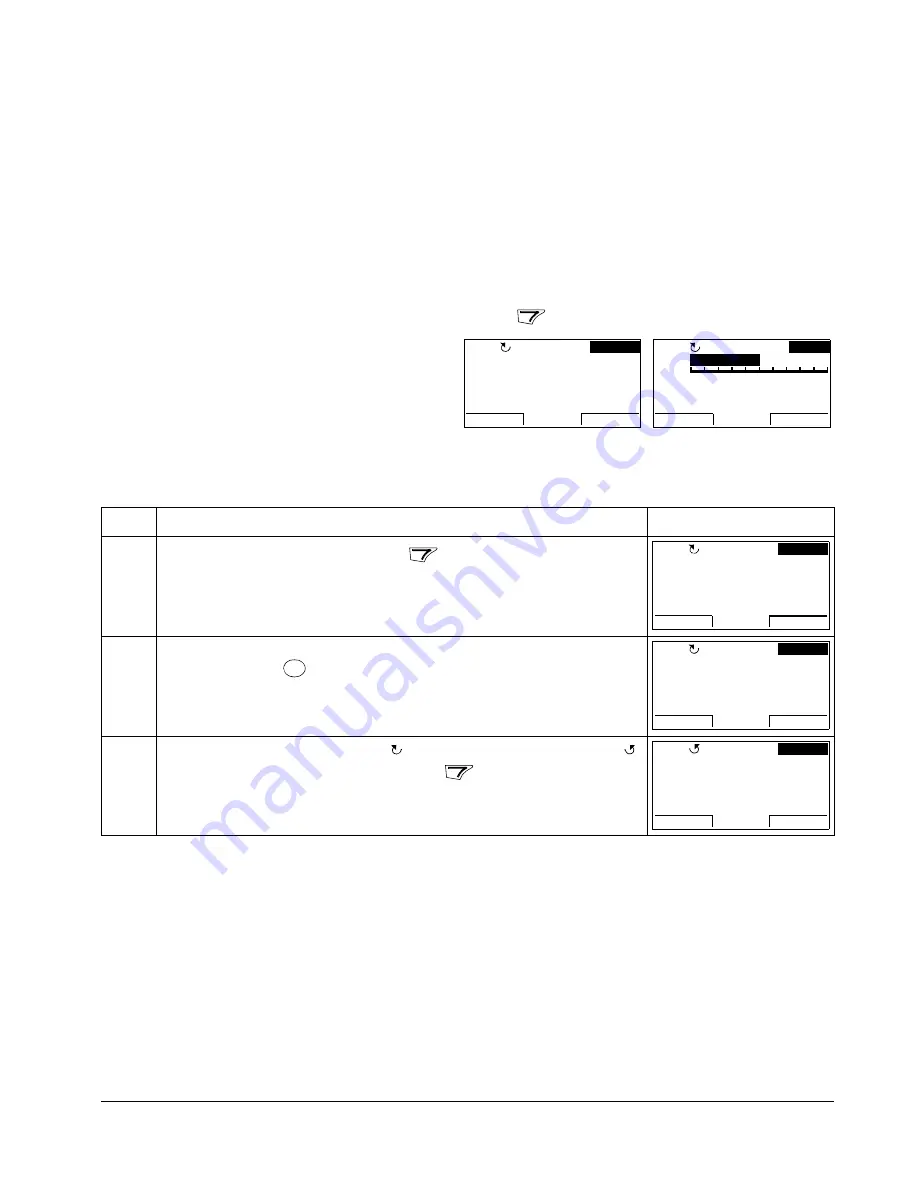
How to change the direction of the motor rotation
Step
Action
Display
1.
If you are not in the Output mode, press
repeatedly until you get there.
2.
If the drive is in remote control (REM shown on the status line), switch to local
control by pressing
. The display briefly shows a message about changing
the mode and then returns to the Output mode.
3.
To change the direction from forward ( shown on the status line) to reverse (
shown on the status line), or vice versa, press
.
Note
: Parameter
1003
DIRECTION
must be set to 3 (
REQUEST
).
EXIT
5 A
1 Hz
7 %
10.
0.
49.
49.1Hz
LOC
DIR
MENU
00:00
4 A
4 %
24.
0.
5.0Hz
LOC
DIR
MENU
00:00
HZ 50%
EXIT
5 A
1 Hz
7 %
10.
0.
49.
49.1Hz
REM
DIR
MENU
00:00
LOC
REM
5 A
1 Hz
7 %
10.
0.
49.
49.1Hz
LOC
DIR
MENU
00:00
DIR
5 A
1 Hz
7 %
10.
0.
49.
49.1Hz
LOC
DIR
MENU
00:00
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com







































































