





























62 Program features
DC voltage control
Overvoltage control
Overvoltage control of the intermediate DC link is typically needed when the motor is
in generating mode. The motor can generate when it decelerates or when the load
overhauls the motor shaft, causing the shaft to turn faster than the applied speed or
frequency. To prevent the DC voltage from exceeding the overvoltage control limit,
the overvoltage controller automatically decreases the generating torque when the
limit is reached. The overvoltage controller also increases any programmed
deceleration times if the limit is reached; to achieve shorter deceleration times, a
brake chopper and resistor may be required.
Undervoltage control (power loss ride-through)
If the incoming supply voltage is cut off, the drive will continue to operate by utilizing
the kinetic energy of the rotating motor. The drive will be fully operational as long as
the motor rotates and generates energy to the drive. The drive can continue
operation after the break if the main contactor (if present) remained closed.
Note:
Units equipped with a main contactor must be equipped with a hold circuit (e.g.
UPS) to keep the contactor control circuit closed during a short supply break.
130
260
390
520
1.6
4.8
8
11.2
14.4
t
(s)
U
DC
f
out
T
M
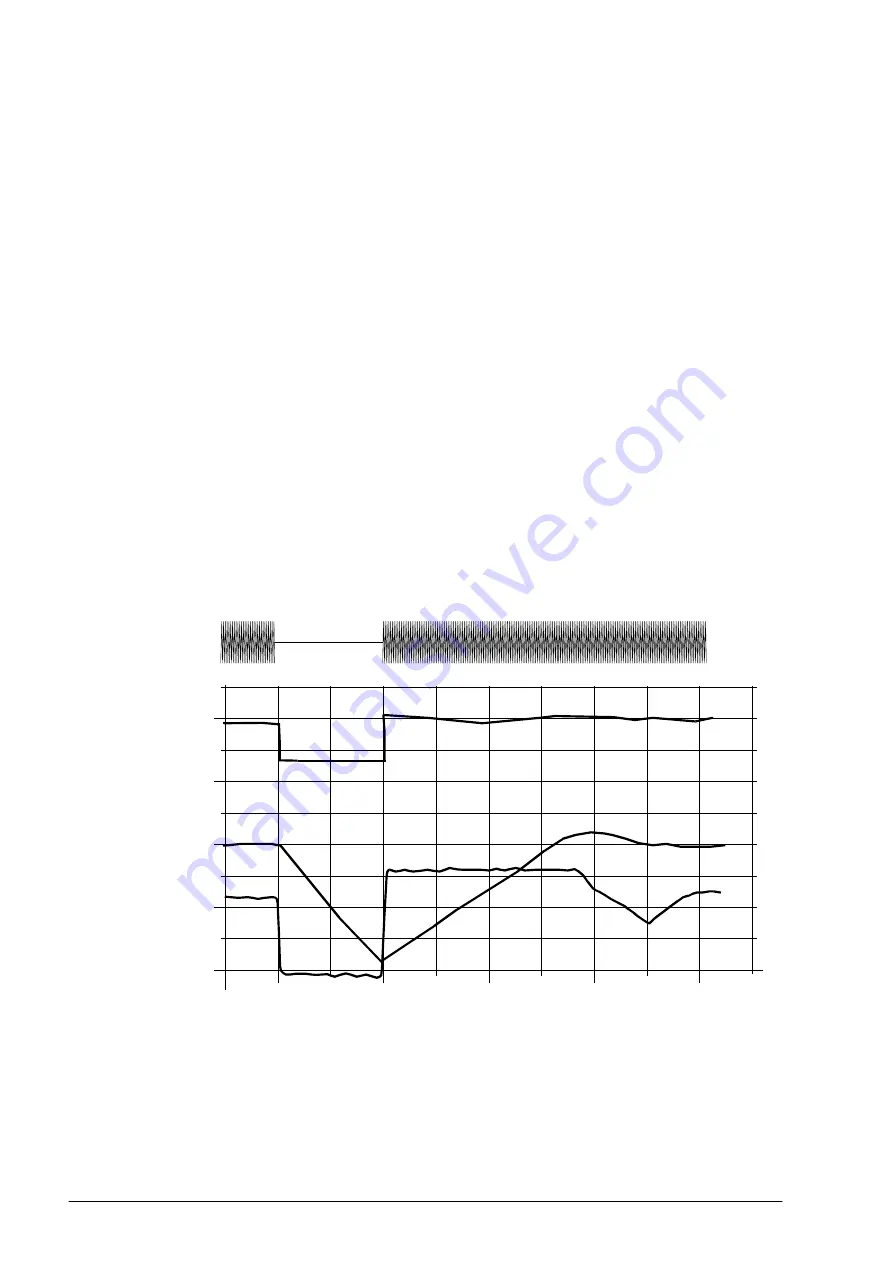
U
DC
= intermediate circuit voltage of the drive,
f
out
= output frequency of the drive,
T
M
= motor torque
Loss of supply voltage at nominal load (
f
out
= 40 Hz). The intermediate circuit DC voltage drops to the
minimum limit. The controller keeps the voltage steady as long as the mains is switched off. The drive runs
the motor in generator mode. The motor speed falls but the drive is operational as long as the motor has
enough kinetic energy.
U
mains
20
40
60
80
40
80
120
160
U
DC
(V DC)
f
out
(Hz)
T
M
(Nm)
Summary of Contents for ACS860
Page 1: ... ABB INDUSTRIAL DRIVES ACS860 primary control program Firmware manual ...
Page 4: ......
Page 10: ...10 Table of contents ...
Page 18: ...18 Using the control panel ...
Page 24: ...24 Control locations and operating modes ...
Page 54: ...54 Program features ...
Page 78: ...78 Program features ...
Page 90: ...90 Application macros ...
Page 342: ...342 Additional parameter data ...
Page 380: ...380 Fault tracing ...
Page 381: ...Fault tracing 381 ...
Page 382: ...382 Fault tracing ...
Page 436: ...436 Control chain diagrams ...







































































