





























Parameters and firmware blocks
83
(1)
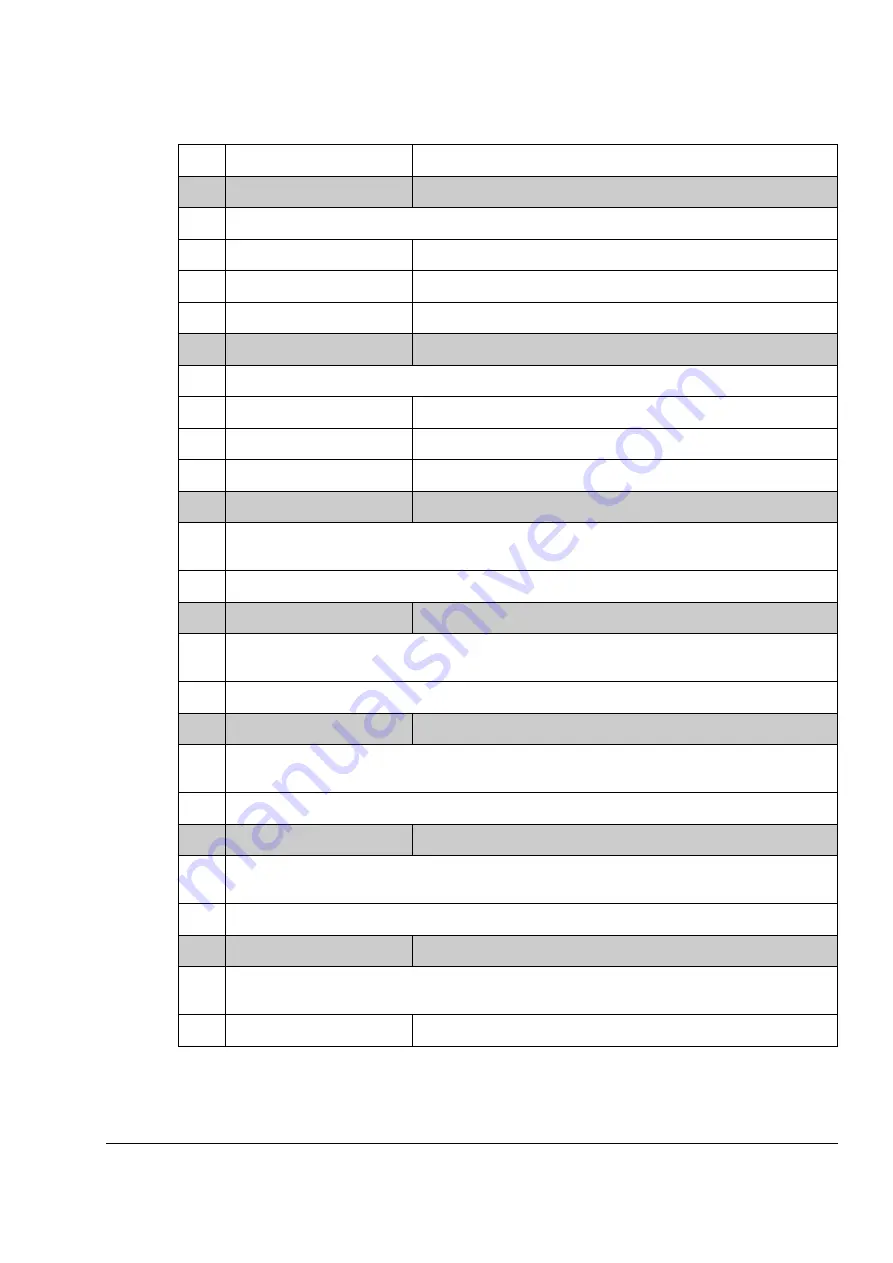
INPUT
DIO1 is used as a digital input.
12.02
DIO2 CONF
(see above)
Selects whether DIO2 is used as a digital input, as a digital output or as a frequency input.
(0)
OUTPUT
DIO2 is used as a digital output.
(1)
INPUT
DIO2 is used as a digital input.
(2)
FREQ INPUT
DIO2 is used as a frequency input.
12.03
DIO3 CONF
(see above)
Selects whether DIO3 is used as a digital input, as a digital output or as a frequency output.
(0)
OUTPUT
DIO2 is used as a digital output.
(1)
INPUT
DIO2 is used as a digital input.
(2)
FREQ OUTPUT
DIO2 is used as a frequency output.
12.04
DIO1 OUT PTR
(see above)
Selects a drive signal to be connected to digital output DIO1 (when
Bit pointer: Group, index and bit
12.05
DIO2 OUT PTR
(see above)
Selects a drive signal to be connected to digital output DIO2 (when
Bit pointer: Group, index and bit
12.06
DIO3 OUT PTR
(see above)
Selects a drive signal to be connected to digital output DIO3 (when
Bit pointer: Group, index and bit
12.07
DIO3 F OUT PTR
(see above)
Selects a drive signal to be connected to frequency output (when
Value pointer: Group and index
12.08
DIO3 F MAX
(see above)
Defines the maximum value for frequency output (when
is set to
3…32768 Hz
Maximum DIO3 output frequency.
Summary of Contents for ACSM1 Series
Page 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Page 2: ......
Page 4: ......
Page 12: ...Table of contents 12...
Page 49: ...Drive control and features 49...
Page 282: ...Standard function blocks 282...
Page 306: ...Application program template 306...
Page 312: ...Control chain block diagrams 312...
Page 331: ...331...
Page 332: ...332...
Page 333: ......







































































