





























3.7.5.2 Configuration of one PROFIsafe-based laser scanner (RobotWare 7.6 or later
and PLC acting as Master)
Preparing the robot system
Required options for system setup
When setting up the system using
Installation Manager
in RobotStudio, select the
options
[3020-2] PROFINET Device
,
[3023-2] PROFIsafe Device
,
[3043-3] SafeMove
Collaborative
and
[3051-1] Profisafe Package
, and the correct robot variant. The
option
Drive System IRB Small Robot
is selected automatically after the robot type
is determined.
Supported parameters for connections to scanner and PLC
Both the laser scanner and the PLC uses a PC-based software tool to configure
the connection parameters that are used to connect to the OmniCore system. The
supported parameters of the OmniCore system are predefined in the configuration
file which could be loaded after the Collaborative Speed Control add-in is installed,
see
Information about Collaborative Speed Control add-in on page 96
. The I/O
configuration can be seen using I/O Engineering Tool in RobotStudio.
The following list shows the configuration parameters. They need to be correctly
configured in the software tools to enable communication between the scanner,
PLC, and OmniCore system.
•
After the robot system is set up, the default IP address of the WAN port is
automatically configured as 192.168.10.10/24. Make sure the scanner and
PLC are also configured in the 192.168.10.XXX segment.
•
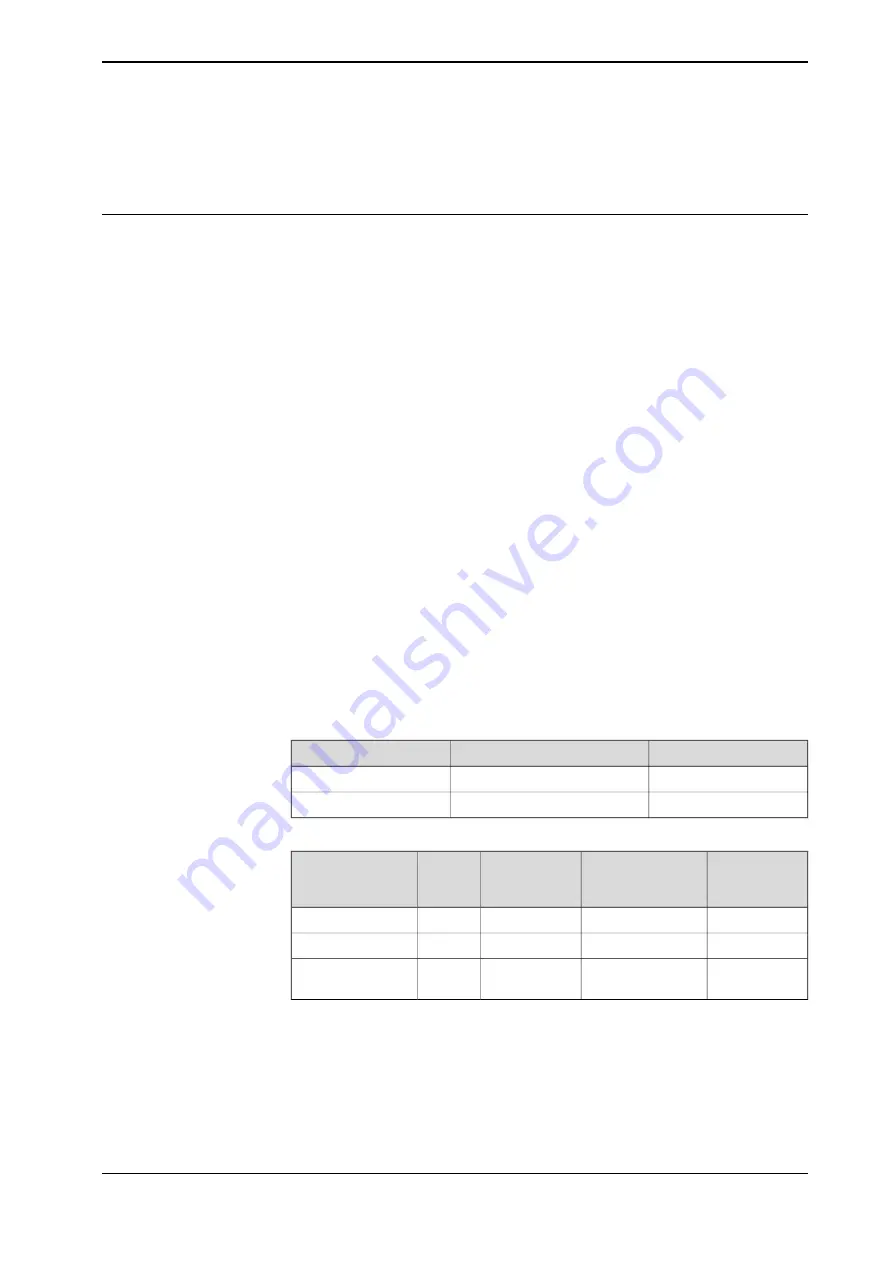
In RobotStudio, open the configuration editor: Controller > Configuration >
I/O Engineering Tool, and get the:
- PROFIsafe parameter values
Value
Parameter
Device slot
4
Source address
SDI
5
Destination address
SDI
- device mapping information
Device slot
Device
Category
Device
mapping
(default)
Signal name
SDI
OmniCore_Internal
ProfiSafe
0
ProtectingArea
SDI
OmniCore_Internal
ProfiSafe
1
WarningArea
SDI
OmniCore_Internal
ProfiSafe
2
SafetyCommunica-
tionEnable
•
The PROFINET device name of the controller must be set to
omnicoreprofisafe
.
Continues on next page
Product manual - CRB 1100
125
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.5.2 Configuration of one PROFIsafe-based laser scanner (RobotWare 7.6 or later and PLC acting
as Master)
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......







































































