





























Enabling lead-through
Use the following procedure to enable lead-through:
1 Make sure the robot is in Manual mode.
2 Enable lead-through in one of the following ways:
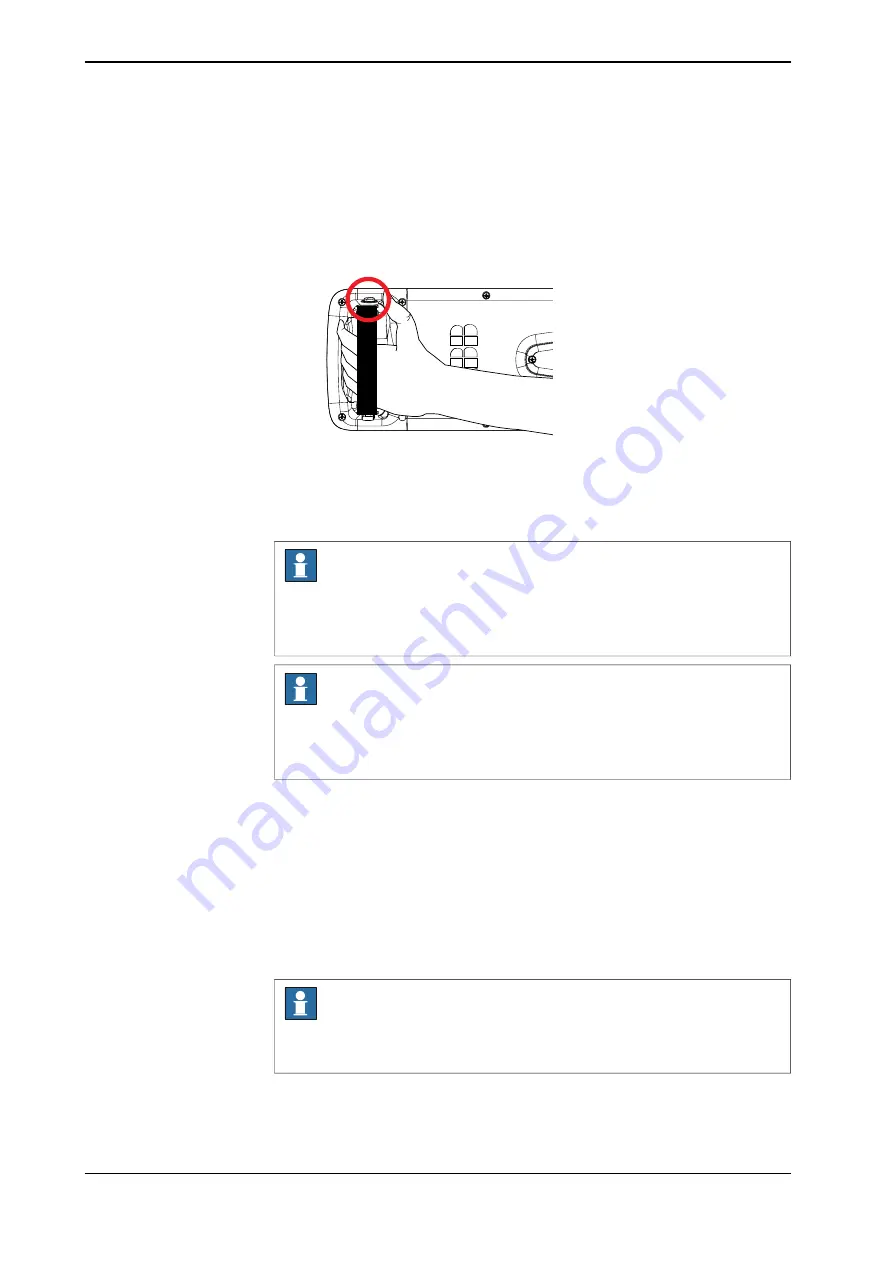
•
Press the thumb button on the FlexPendant.
xx2100000331
•
On the start screen, tap
Jog
and select the
Lead-through
menu.
•
In the
QuickSet
menu, select the
Lead-through
tab.
Note
If the robot is in motors off state, set the controller to Motors On state first
by pressing the three-position enabling device or changing the state in the
Control Panel
tab page.
Note
For robots operating in RobotWare version earlier than 7.7, the lead-through
device can only be enabled from the
Jog Setting
tab page by tapping
Jog
in the
QuickSet
window.
3 In the
Lead-through Mode
section select a mode.
4 If required, in the
Lead-through lock
section use the lock button next to a
axis to lock it.
5 Hold the handler of the lead-through device and gently move the robot to the
desired position.
The robot moves to the selected position. If the
Lead-through lock
option is
selected, the robot moves in such a way that the movement is restricted in
the locked direction.
Note
You can feel if an axis reaches its end position. Do not try to force the axis
beyond this position.
6 If desired, save the position.
Continues on next page
112
Product manual - CRB 1300
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.3 Lead-through
Continued
Summary of Contents for CRB 1300
Page 1: ...ROBOTICS Product manual CRB 1300 ...
Page 50: ...This page is intentionally left blank ...
Page 662: ...This page is intentionally left blank ...
Page 690: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 725: ......




































































