



























Note
Action
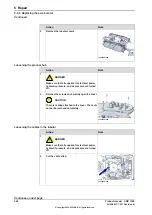
xx2000001599
Loosen the screws and move the motor slightly
to slacken the timing belt.
3
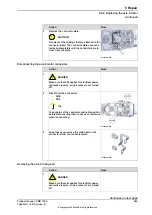
xx2000001600
Remove the timing belt from its groove on the
motor.
4
Removing the axis-6 motor
Note
Action
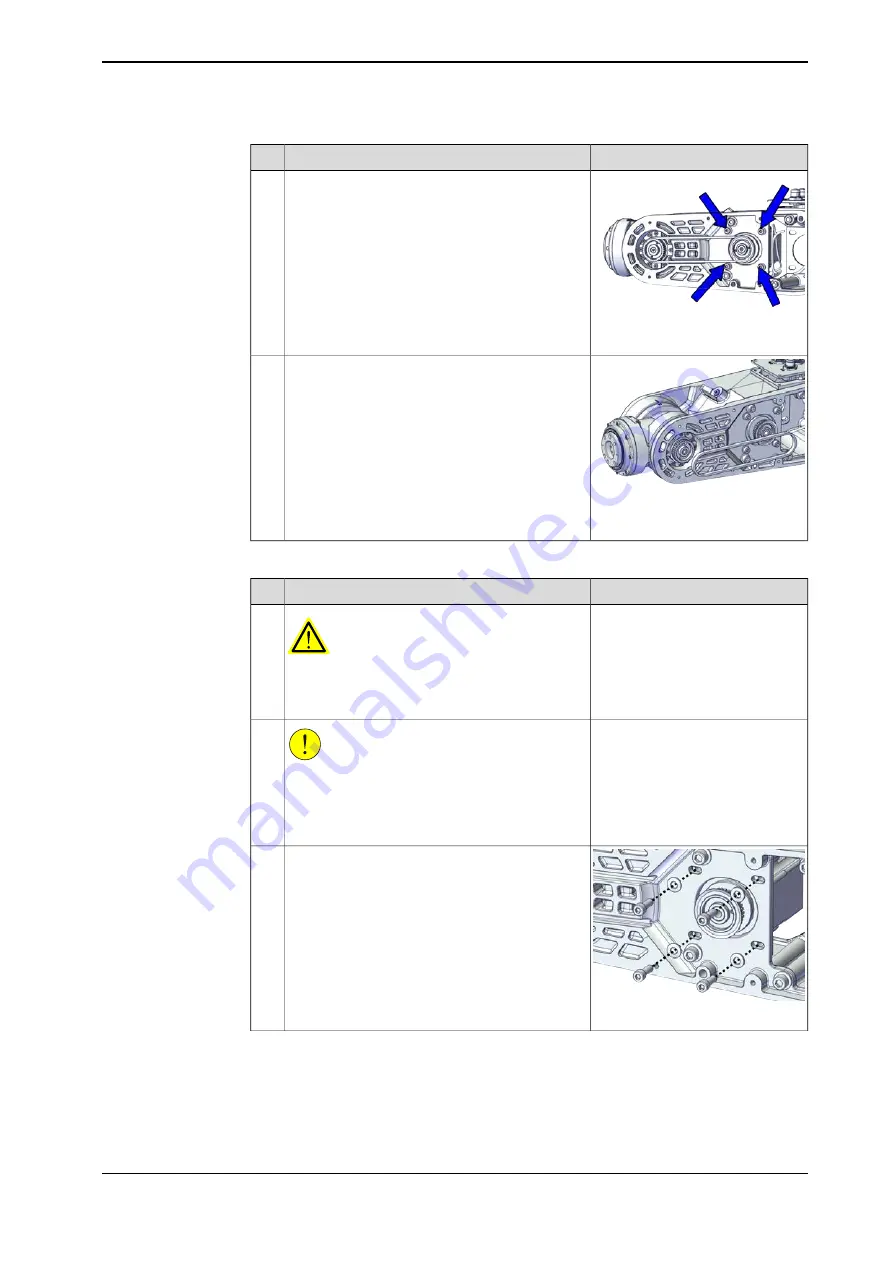
DANGER
Make sure that all supplies for electrical power,
hydraulic pressure, and air pressure are turned
off.
1
CAUTION
Removing motors will release axes. This means
the axes can fall down.
Make sure axes are well supported before remov-
ing motors.
2
xx2000001601
Remove the screws and washers.
3
Continues on next page
Product manual - CRB 1300
547
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
5 Repair
5.6.6 Replacing the axis-6 motor
Continued
Summary of Contents for CRB 1300
Page 1: ...ROBOTICS Product manual CRB 1300 ...
Page 50: ...This page is intentionally left blank ...
Page 662: ...This page is intentionally left blank ...
Page 690: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 725: ......







































































