




















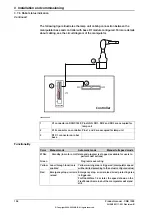








Configuring the laser scanner
Protection fields
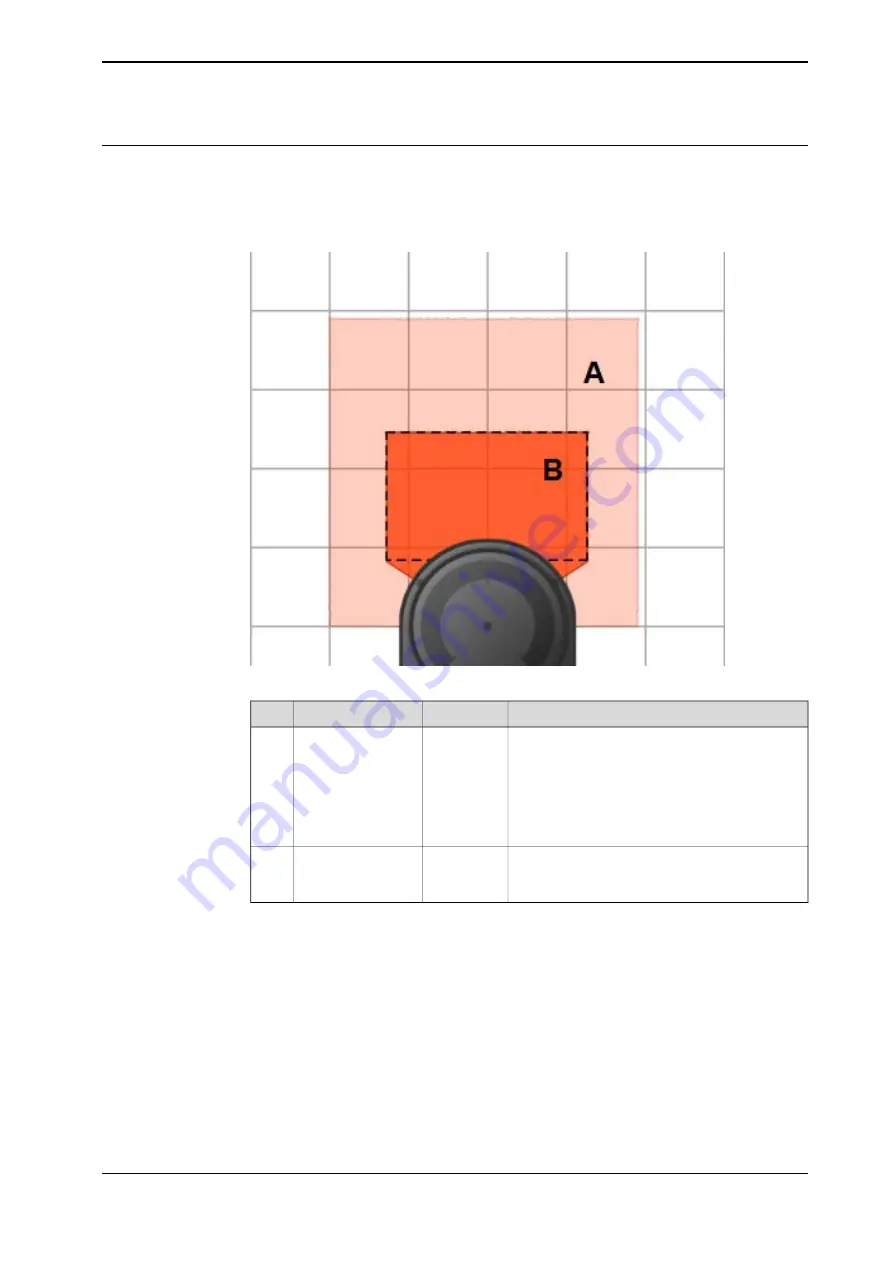
Two protection fields are defined to provide a progressive safety protection. The
following figure illustrates the field ranges.
xx2200000301
Description
Lamp color
Field
The warning area field defines the largest range,
but it shall be within the scanning range of the
scanner.
Yellow
WarningArea
A
Within in this field range, the lamp unit on the
process hub lights up yellow, and the robot
movement speed reduces to a lower speed that
is set by the user.
Within this field range, the lamp unit turns to red
and the robot movement speed is reduced to 0.
The robot stands still.
Red
ProtectingArea
B
Configuration procedure
Before starting the configuration, obtain the software tool
Safety Designer®
from
SICK's website first. Make sure the software tool is in the latest version.
Detailed procedures about how to configure the laser scanners are detailed in
Operating instructions microScan3 - Pro I/O
from the vendor. Following described
the procedure roughly:
1 Open configuration software tool
Safety Designer®
.
2 Set IP address in
Configuration
>
Addressing
.
•
Make sure the scanner IP addresses are in the same network segment
with the PC used for configuring the scanner.
Continues on next page
Product manual - CRB 1300
151
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.5.6 Configuration of two SafetyIO-base laser scanners (RobotWare 7.6 or later)
Continued
Summary of Contents for CRB 1300
Page 1: ...ROBOTICS Product manual CRB 1300 ...
Page 50: ...This page is intentionally left blank ...
Page 662: ...This page is intentionally left blank ...
Page 690: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 725: ......







































































