




























Deactivating the SpeedHandling function
Note
Modified configuration must always be validated to verify that the desired safety
is achieved. If no validation is performed, or the validation is inadequate, the
configuration cannot be relied on for personal safety.
The SpeedHandling function is activated by default after the Collaborative Speed
Control add-in is installed and the SafeMove template is loaded. The function is
used to enable or disable speed-related actions for speed control.
It is possible to use the following procedure to deactivate the SpeedHandling
function based on risk assessment of the final application:
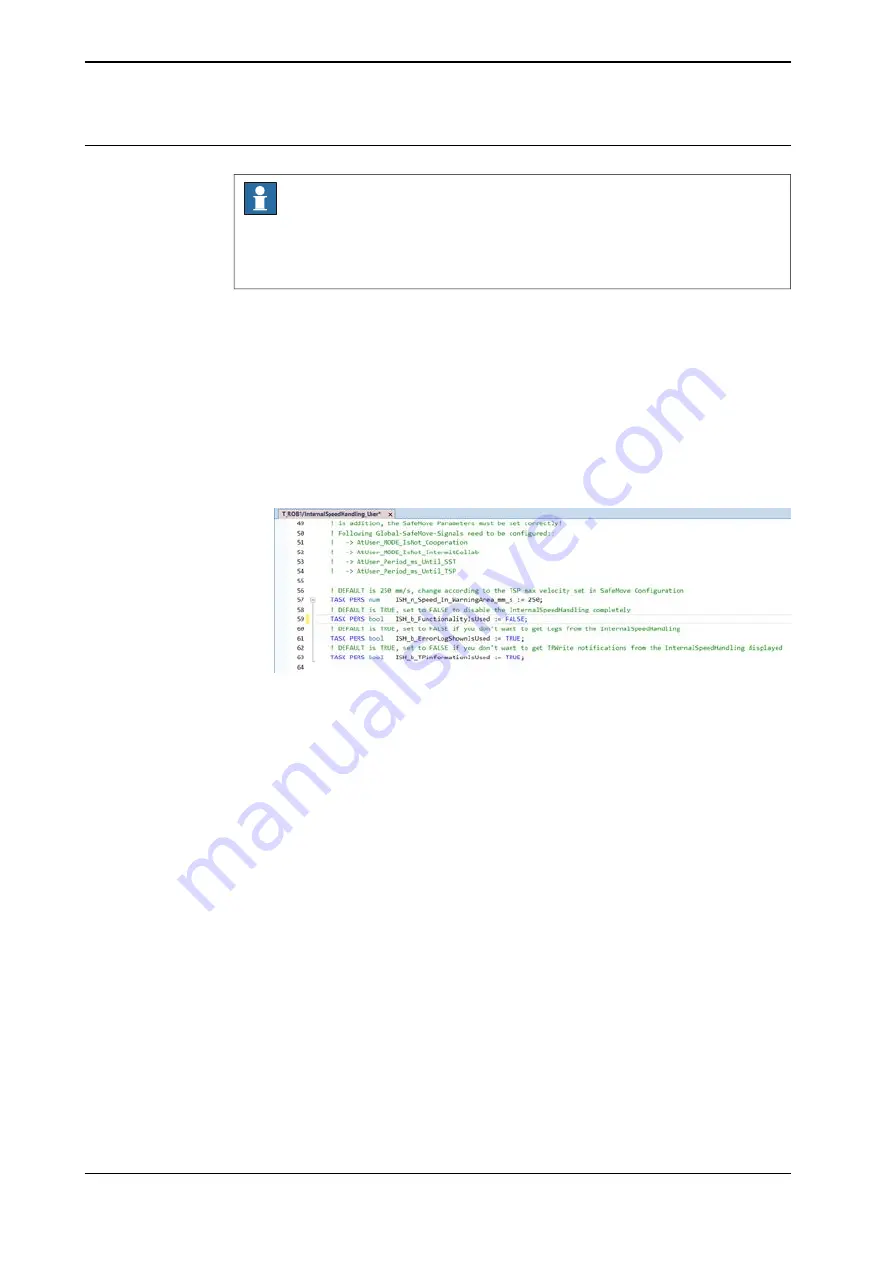
1 In RobotStudio, open the RAPID program InternalSpeedHandling_User in
task T_ROB1.
2 Navigate to the function ISH_b_FunctionlityIsUsed and set its value from
default TRUE to FALSE.
xx2200000435
3 Save the change and apply to the controller.
SafeMove configurations also affect the speed control on the robot to achieve
further safety. SafeMove is still functional after the SpeedHandling function in
RAPID program is deactivated.
Use the following procedure to disable the speed control function provided by
SafeMove:
1 Open the RobotStudio.
2 Log in the controller using the Admin account and request the write access.
3 In the
Controller
tab, choose
Visual SafeMove
from the
Safety
group in the
Configuration
category.
4 In the
Visual SafeMove
tab, click
Safe IO Configurator
in the
Configuration
group.
Continues on next page
160
Product manual - CRB 1300
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.7 Use cases of safety configurations
Continued
Summary of Contents for CRB 1300
Page 1: ...ROBOTICS Product manual CRB 1300 ...
Page 50: ...This page is intentionally left blank ...
Page 662: ...This page is intentionally left blank ...
Page 690: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 725: ......






































































