





























Approximate positioning of wCamera1 in the FlexLoader SC 6000.
xx1900000366
Finally, check the calibration by the following simple test.
Move the robot calibration tool tip to point x=0, y=0, z=0 in wCamera1. Use the
mouse curser coordinate display in FlexLoader Vision and point at the image of
the calibration tool tip. The displayed value should be close to x=0, y=0.
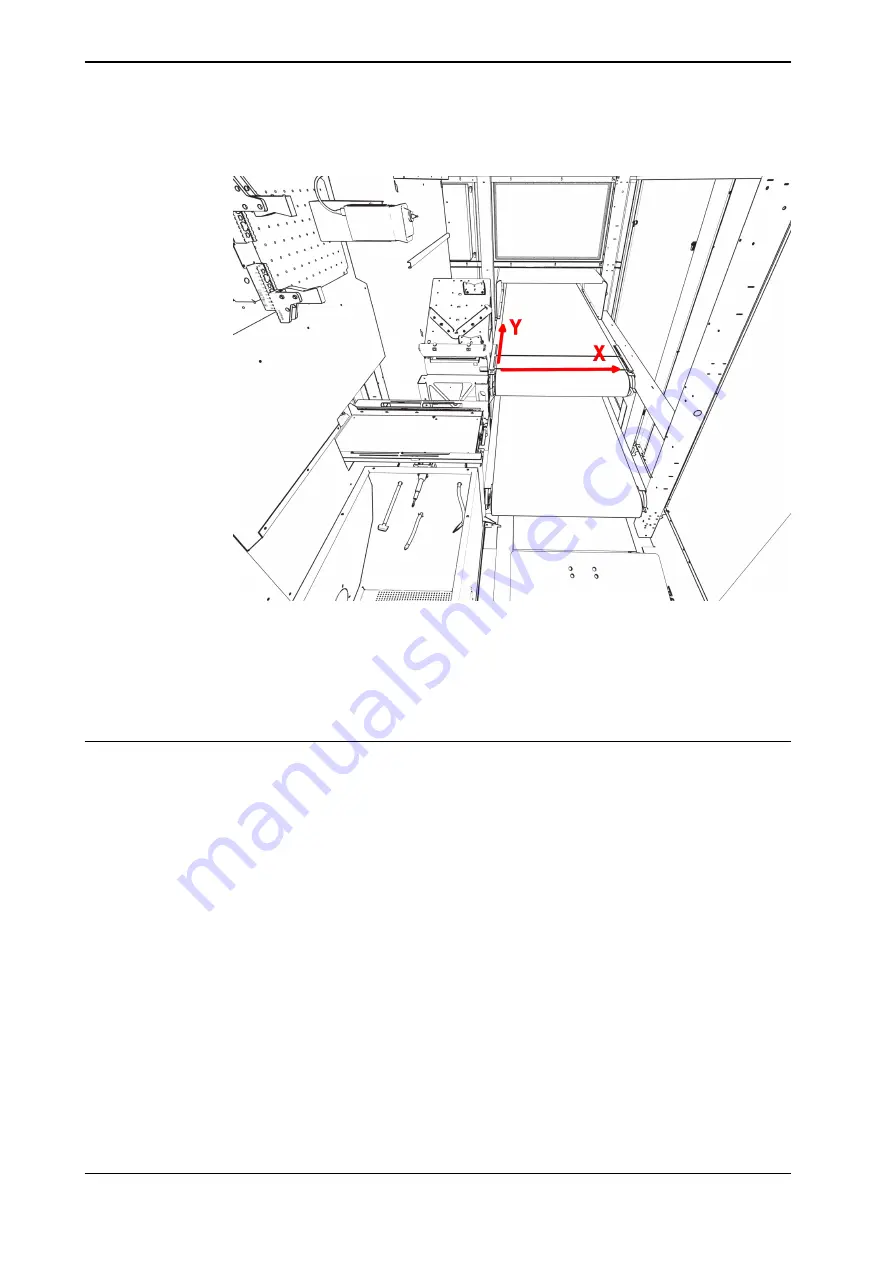
Outconveyor coordinate system wFeederOut
Coordinate system for leaving on outconveyor. The X-axis is above the idler roller
shaft, the Y-axis is at the left belt edge and in the direction of movement of the belt,
and the Z-axis points upwards. Perform a standard 3-point calibration.
Afterwards, call the calibration routine CalibSpeedFeederOut. Depending on the
use of the system, the point-of-interest, pLeaveFeederOut, is used differently. In
Continues on next page
64
Product manual - FlexLoader SC 6000
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
4 Commissioning
4.4.2 Calibration of the coordinate systems
Continued
Summary of Contents for FlexLoader SC 6000
Page 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 172: ...This page is intentionally left blank ...
Page 174: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 178: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 192: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 283: ......







































































