





























Marking unit wMarker
The marking unit coordinate system wMarker is oriented as follows. Standard
3-point calibration. Use the three mounting holes on the marking unit as calibration
points (X1, X2, Y1) and lower the calibration tool into the holes. No exact positioning
of this coordinate system is necessary due to the nature of the marking process.
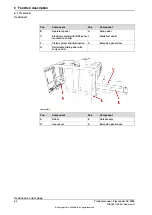
xx1900000372
Approximate positioning of wMarker in the FlexLoader SC 6000
Afterwards, call the calibration routine
CalibMarker
. The point-of-interest is where
the calibration tool touches the marking needle, with the marking needle at a
suitable marking distance. Note that orientation of the tool can be used.
Main and sub chuck of the machine tool
When using FlexLoader Vision Lite, the following machine tool coordinate systems
have to be defined.
Coordinate system
wMainChuckM1
and
SubChuckM1
for the main chuck and sub
chuck of the machine tools.
Continues on next page
70
Product manual - FlexLoader SC 6000
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
4 Commissioning
4.4.2 Calibration of the coordinate systems
Continued
Summary of Contents for FlexLoader SC 6000
Page 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 172: ...This page is intentionally left blank ...
Page 174: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 178: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 192: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 283: ......


































































