







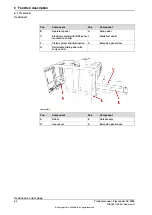





















6.2 General function description
The purpose of FlexLoader SC 6000 is to feed parts to the cameras field of view
where they are to be identified by a camera and picked by a robot. The inconveyor
is filled with parts manually. Finished parts are left on the outconveyor. These are
then picked manually by the operator.
The belt system of the FlexLoader SC 6000 is controlled by a number of background
tasks (FlexLoader SC 6000 core functions).
Functions for inconveyor
•
Two operation modes, either manual or automatic operation. Changing
operation mode by operator and after confirmation from robot.
•
Forward and backward operation using a switch.
•
Sensor to stop the belt when the part reaches the cameras field of view.
•
Sensor to stop the belt when the part reaches the end of the belt.
•
Adjustable belt speed, changed at frequency inverter.
•
Time monitored belt stop with manual reset.
•
After powering up the FlexLoader SC 6000 and after emergency stop, the
inconveyor is stationary.
Functions for outconveyor
•
Two operation positions, either automatic operation or emptying. Changing
operation mode via operator.
•
Sensor to stop the belt when the part reaches the end of the belt.
•
Time monitored belt stop with manual reset.
•
In order for outconveyor in emptying mode to start running after powering
up or emergency stop, a brief switch to automatic operation and back to
emptying mode is required.
Functions for marking unit
This manual describes the basic operations controlled during automatic operation,
control operation, and basic setup operation. In-depth information is given in the
manual of the marking unit. This manual can be found in the documentation folder
on the FlexLoader Vision PC.
During automatic operation, the robot controls the start and stop of marking.
Communication is performed by means of standard serial channel communication.
Functions for other options
Functions for other options, e.g. air cleaning box, deburring, turn station and re-grip
table, are controlled by various output signals directly from the robot.
90
Product manual - FlexLoader SC 6000
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
6 Function description
6.2 General function description
Summary of Contents for FlexLoader SC 6000
Page 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 172: ...This page is intentionally left blank ...
Page 174: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 178: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 192: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 283: ......







































































