





























For the Cirrus 3D case, configure each camera as usual, with separate dll and xml
files, but assign identical IP addresses to all cameras.
CAUTION
The application must ensure that no simultaneous image acquisitions are initiated
on a single camera.
Simultaneous image acquisitions can lead to unpredictable and erroneous
behavior.
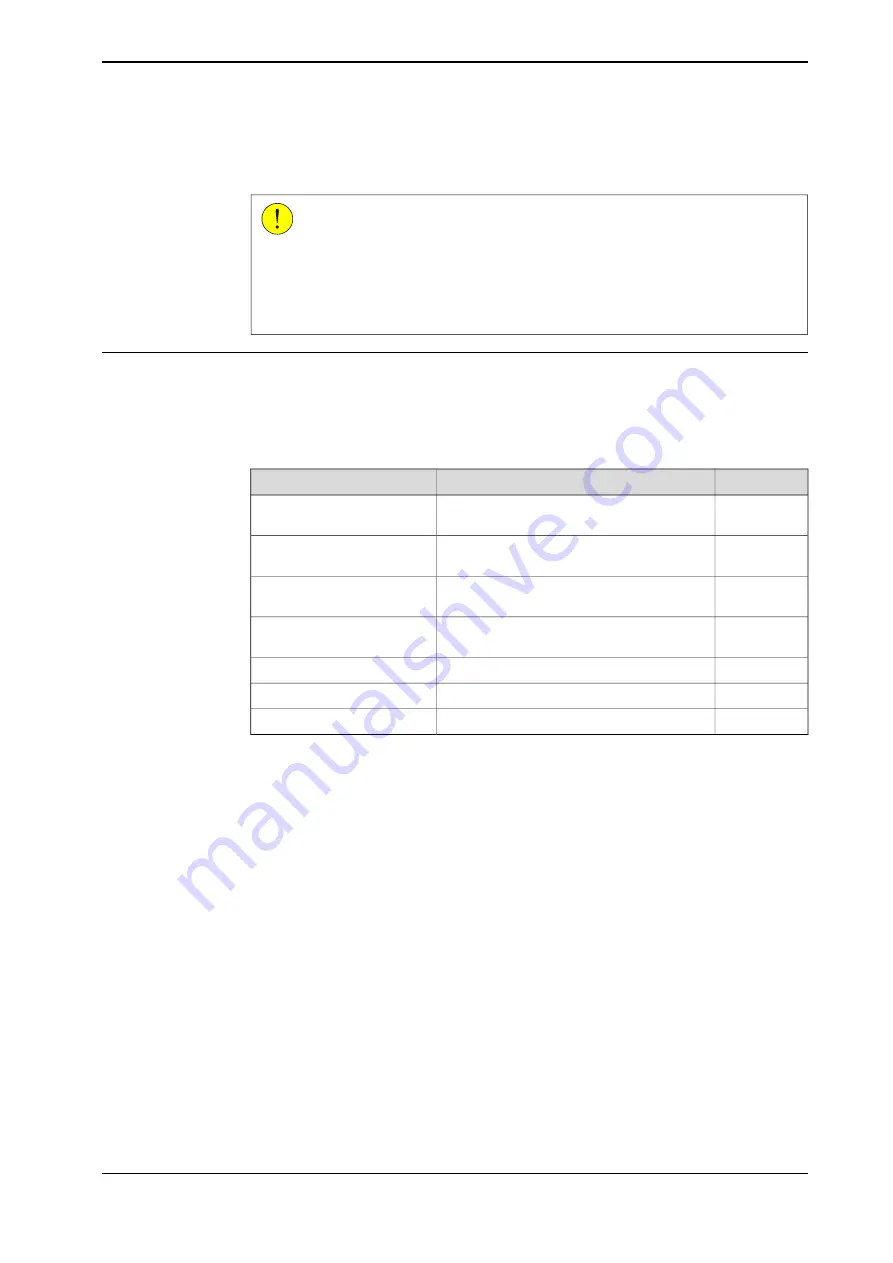
Mechanical settings
The mechanical settings determines visual information and communication settings.
Information with regard to the mechanical feeder is shown during teachin and while
working with system settings.
Communication information is used during system initialization and operation.
Default
Description
Mechanical settings
Yes
No data is exchanged with external PLC, and
no information is shown on HMI.
None/PLC
No
Selects FP 300 specific settings for this
camera.
FP 300
No
Selects FP 400 specific settings for this
camera.
FP 400
No
Selects user-defined specific settings for this
camera.
UserDefined
No
Can be selected for some feeders.
Has extra tipper
No
Can be selected for some feeders.
Has rotation unit
No
Can be selected for some feeders.
Has user defined data
Continues on next page
Product manual - FlexLoader Vision
143
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
11 Commissioning
11.1.3 Camera settings
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































