





























Defining the calibration tool
1 Attach the supplied calibration tool to the robot. Note that the calibration tool
may look different from that shown in image above, depending on which type
of robot and which other gripper equipment is used in the specific application.
xx1800000262
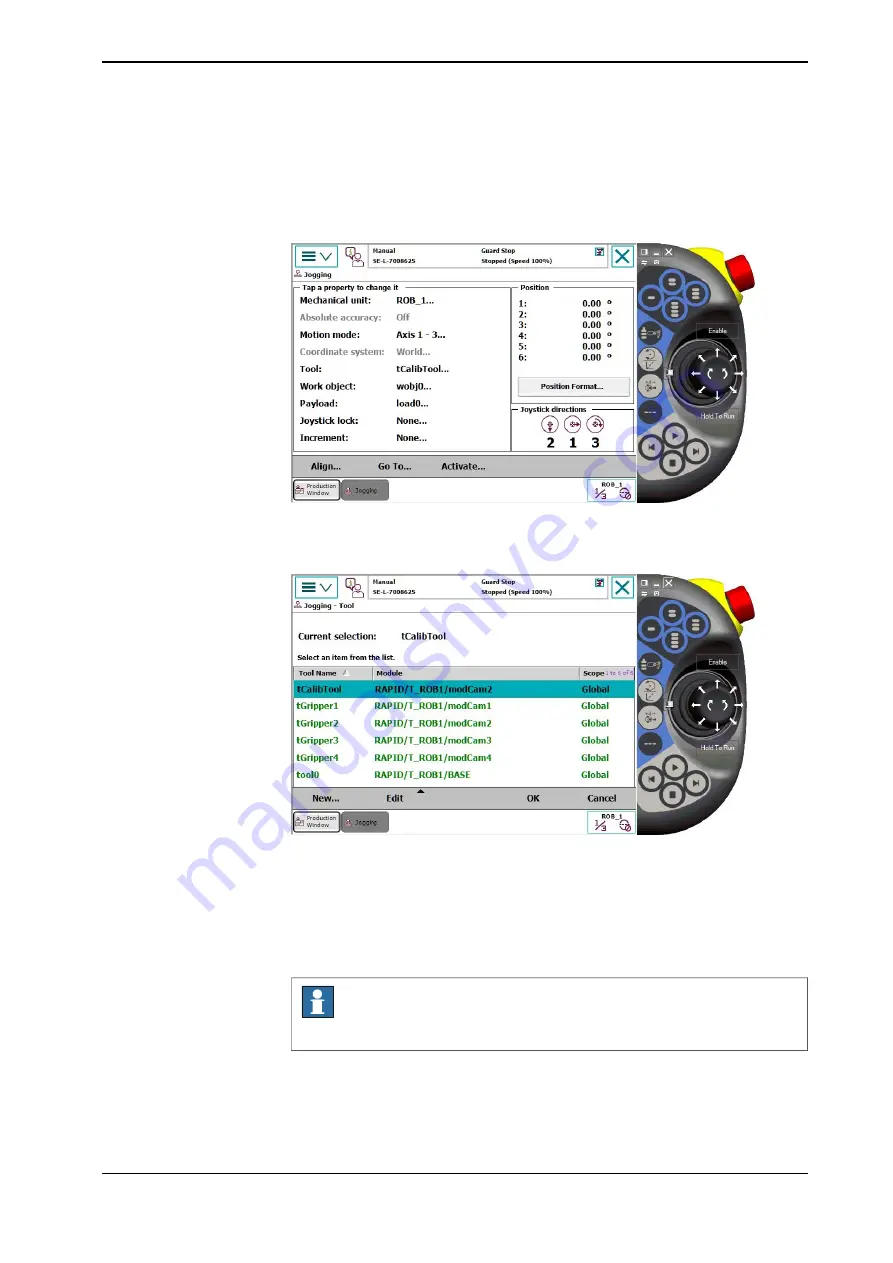
2 Open the main menu on the FlexPendant and select
Jogging
>
tCalibTool
.
xx1800000263
Defining the work object
1 Open the main menu and select
Programdata
>
wobjdata
>
Show data
.
2 Select the work object to be calibrated.
wCamArea1
for camera 1,
wCamArea2
for camera 2, etc. Then tap
Edit
>
Define
.
Note
wCamera is only used temporarily in the robot and should not be calibrated.
Continues on next page
Product manual - FlexLoader Vision
183
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
13 Robot integration
13.2 Calibrating the robot
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......




































































