





























14.3.2 Load
Overview
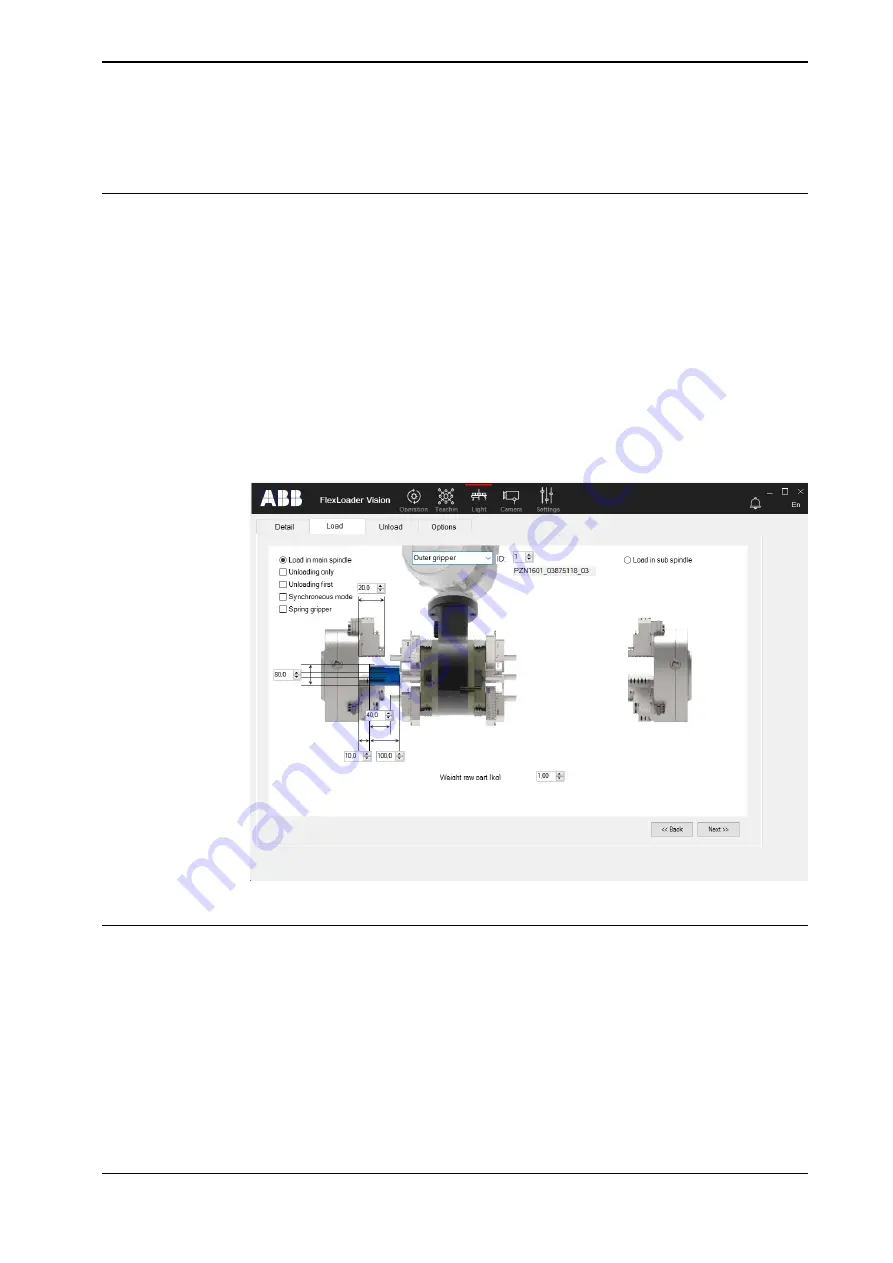
The
Load
tab specifies all the essential dimensions for loading a detail.
•
Diameter and height of the raw material.
•
Grip height for the raw material (TCP for the gripper fingers is assumed to
be at the lower edge of the fingers).
•
The protrusion of the chuck fingers and the insertion depth of the part.
•
Part weight.
In addition, the gripper type is specified (
Outer gripper
/
Inner gripper
) as well as
the ID number of the gripper fingers. If desired you can choose to load in the
sub-spindle.
If enabled by the integrator, activation codes for user-defined sequences can be
sent to the robot.
xx1800000275
Normal loading procedure
Normally, the new raw material is loaded first and the finished detail is unloaded
later:
1 The robot retrieves the detail on the camera belt.
2 The robot loads the new detail in the machine.
3 The robot retrieves the finished detail in the machine with its empty gripper.
4 The robot exits the machine, performs any activated options and leaves the
finished detail on the outconveyor.
Continues on next page
Product manual - FlexLoader Vision
227
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
14 FlexLoader Vision Lite
14.3.2 Load
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































