





























Description
Robot data
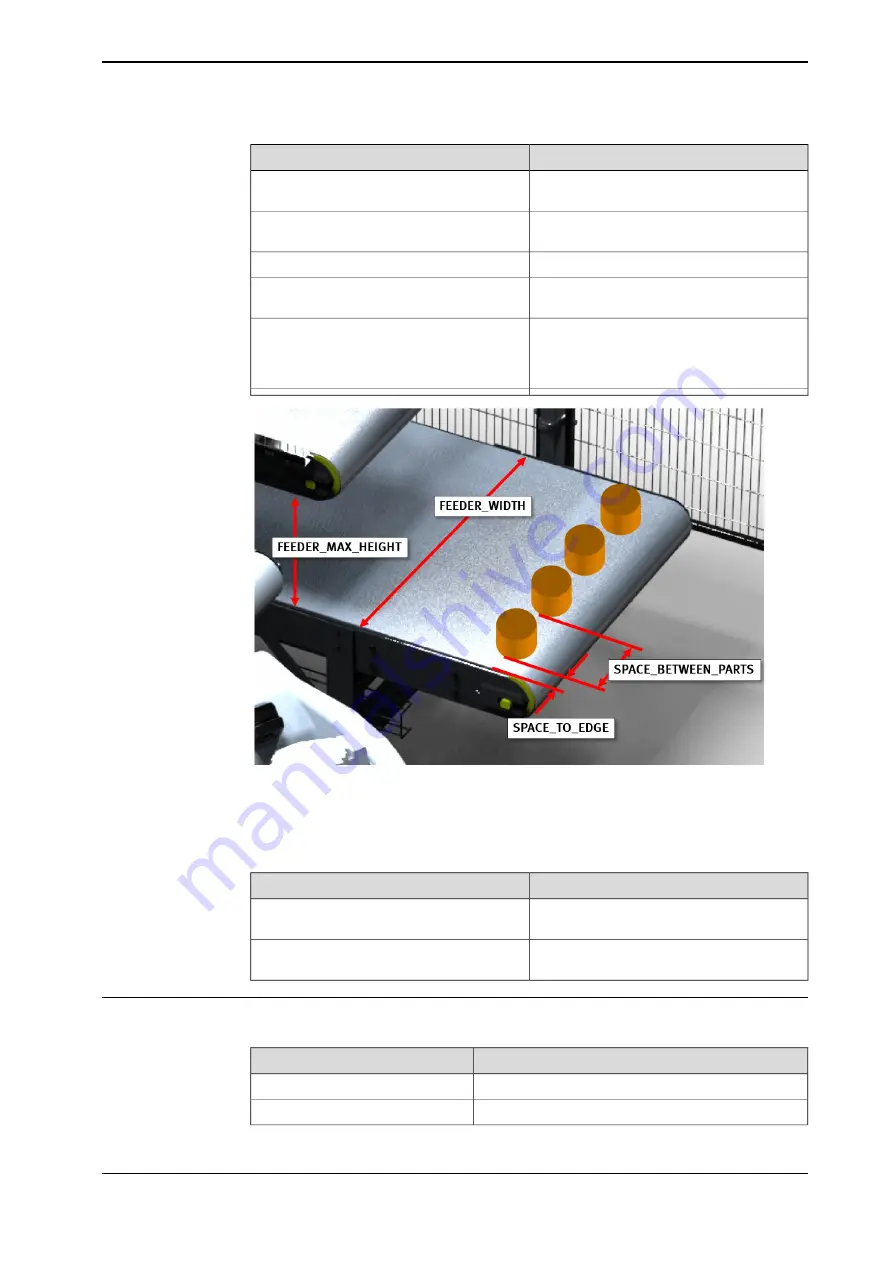
Minimum distance between belt edge and
detail.
SPACE_TO_EDGE
Maximum height of details that are placed or
stacked on the outconveyor.
FEEDER_MAX_HEIGHT
Minimum permitted detail diameter.
MIN_RAW_DETAIL_DIAMETER
Distance from outconveyor motor shaft to
actual leave position.
Y_DISTANCE_TO_LEAVE
The angle the robot leaves the part on the
detail on the outconveyors right side. At the
left side the angle offset is always zero. Set
this value to 0 for no angle change.
MAX_LEAVE_ANGLE_OFFSET
xx1800000319
Compensation of load-induced deviations
Close to loading position, put a reasonable additional weight on the gripper and
measure the load induced lowering of the robot arm.
Description
Robot data
Load induced lowering of the robot arm, in
mm.
nLoadCompensateDistance
Load that was used for measuring nLoadCom-
pensateDistance
nLoadCompensate
Gripper
The following gripper is used in a FlexLoader Vision Lite system:
Description
Robot data
Calibration gripper that attaches to gripper 1.
tCalibTool1
Calibration gripper that attaches to gripper 2.
tCalibTool2
Continues on next page
Product manual - FlexLoader Vision
239
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
14 FlexLoader Vision Lite
14.4.1 Robot
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......





































































