





























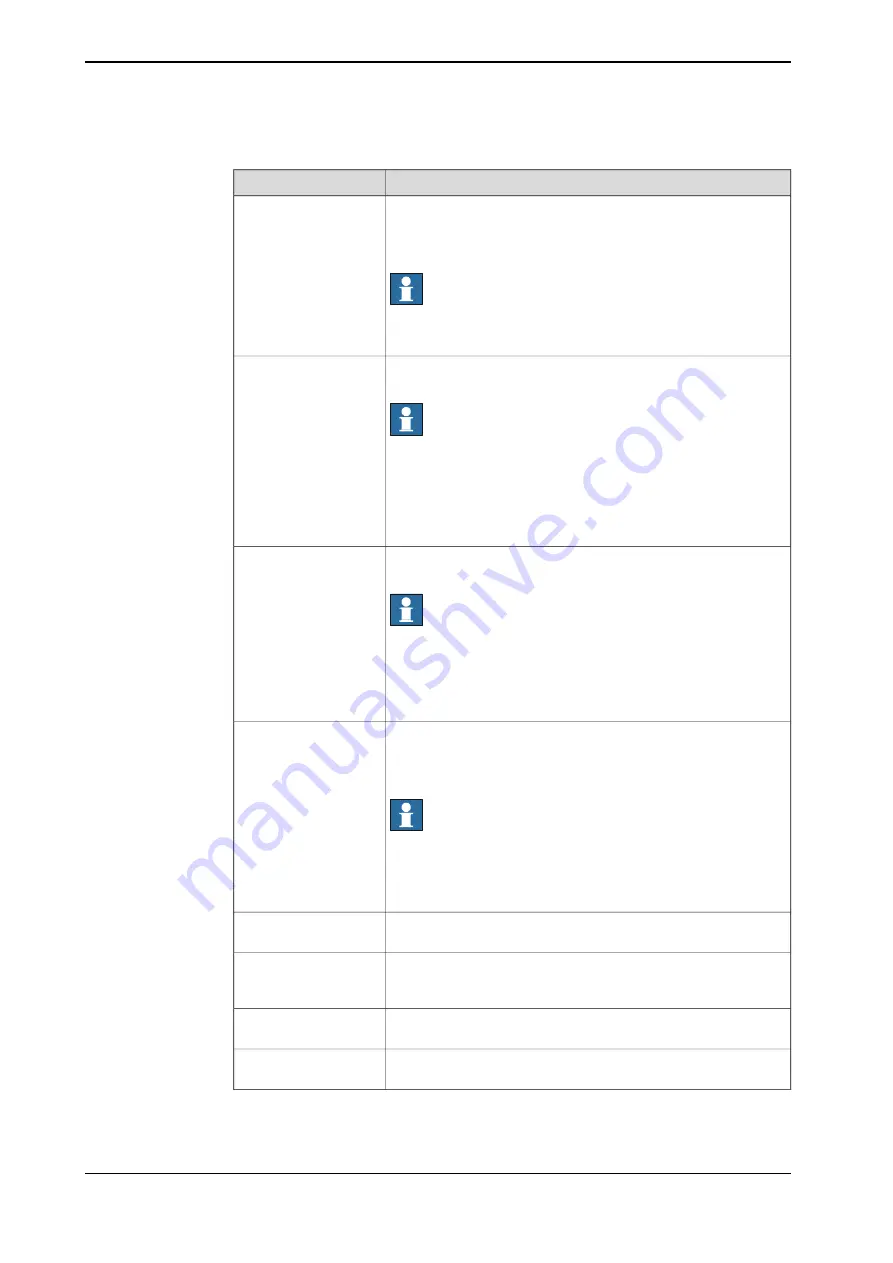
Important routines
Description
Routine
If
SetNextTarget
returns valid grip information,
ConfirmPick
must
be called up by the user to run the conveyor on and complete the
started grab-pick sequence. This usually occurs by calling up
RefPosOut
.
Note
One
GrabImage
must always be confirmed with
SetNextTarget
and
ConfirmPick
before the next
GrabImage
is started.
ConfirmPick1..4()
Called up by the user if a new image is to be taken in FlexLoader
Vision before all sent coordinates are used.
Note
Routines such as
DiscardAndTakeNewImage()
are to be used
with care. If the normal
GrabImage
-
SetNextTarget
-
ConfirmPick
chain is deviated from, it is extremely important to have full control
of all image taking, to prevent that double images are taken (a
new image is taken before the previous image has been pro-
cessed).
DiscardAndTakeNewIm-
age(nCamera)
Called up by the user in order to start the feeder before all sent
coordinates are used.
Note
Routines such as
DiscardAndStartBelt()
are to be used with care.
If the normal
GrabImage
-
SetNextTarget
-
ConfirmPick
chain is
deviated from, it is extremely important to have full control of all
image taking, to prevent that double images are taken (a new im-
age is taken before the previous image has been processed).
DiscardAndStart-
Belt(nCamera)
Called up by the user to take a new image with the selected
camera. The routine waits until the accompanying signal
InPosi-
tion
is 1 and sends a command to FlexLoader Vision to take a
new image with
nCamera
.
Note
Do not use
GrabImage
if the camera is set to
AL-
LOW_AUTO_GRAB = TRUE
(set in
IntitializeCamX
in
ModCamX
).
New images will be requested automatically after
Con-
firmPick1..4()
.
GrabImage(nCamera)
Called up at the beginning of the program to initialize the commu-
nication with FlexLoader Vision.
InitFlexLoaderVision()
Can be called up to write an input query on the FlexLoader Vision
user interface. The function returns the reply that the operator has
entered.
PvInputBox()
Can be called up to write a message on the FlexLoader Vision
user interface and read off the operator’s reply (
Ok
,
Yes
,
No
).
PvMessageBox()
Returns current operating status in FlexLoader Vision (
PV_IDLE
,
PV_OPERATION
,
PV_STARTING
,
PV_STOPPING
).
SendPvStatus()
Continues on next page
260
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
B FlexLoader RAPID reference
B.2 FlexLoader Vision interface
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......


































































