





























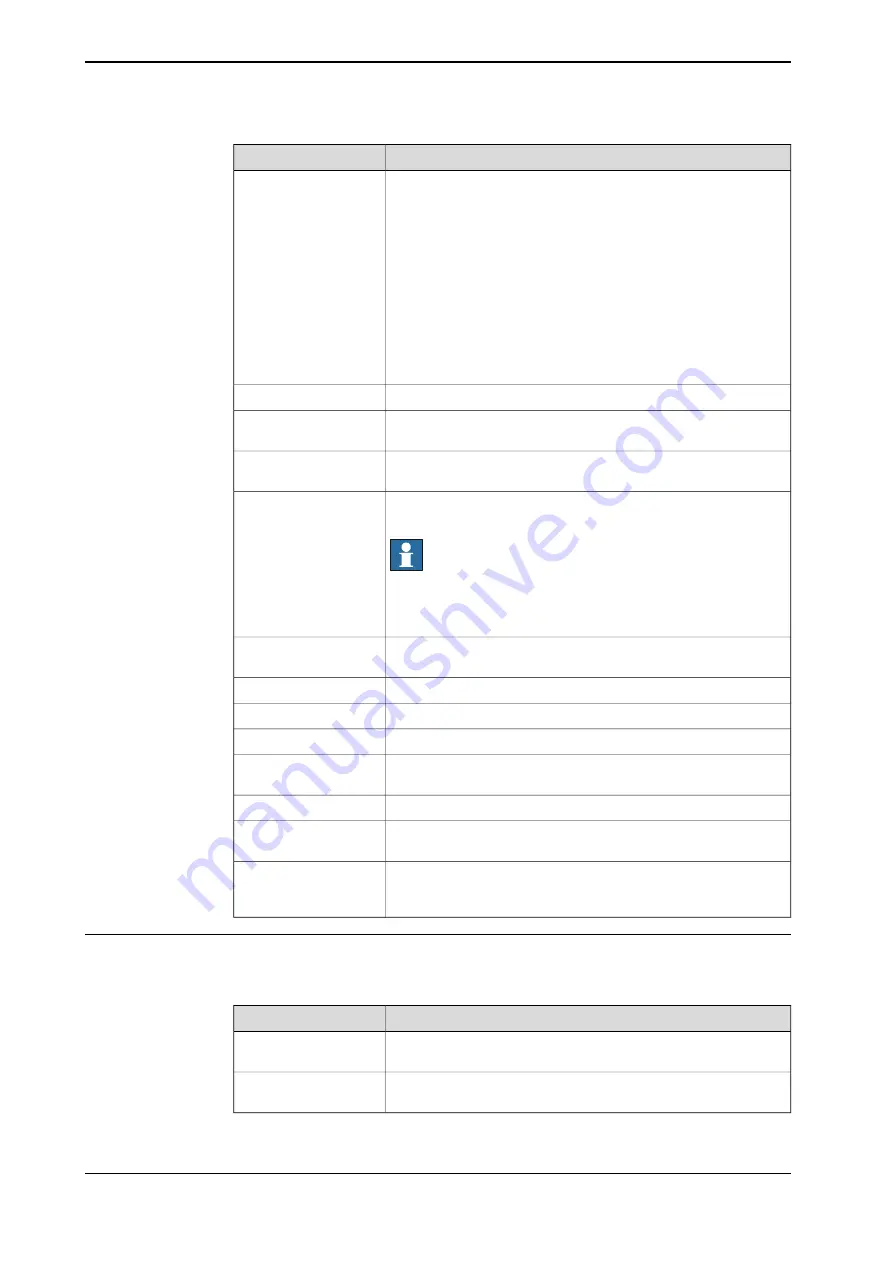
Description
Routine
Sends a reconfiguration to FlexLoader Vision to concentrate the
camera’s field of view on the selected areas. The user can either
make a rectangular area invisible (=black image), or make the
area outside a selected rectangle invisible.
SendBlackRe-
gion(sBlackRegion)
The areas are specified in the format A-BBB-CCC-DDD-EEE-F,
as follows:
A indicates camera number (1–4). BBB indicates in percent where
the rectangle starts in the x-axis (000–100). CCC indicates in
percent where the rectangle ends in the x-axis (000–100). DDD
indicates in percent where the rectangle starts in the Y-axis
(000–100). EEE indicates in percent where the rectangle ends in
the Y-axis (000–100). F indicates whether the actual rectangle
becomes black (1) or if the surrounding area becomes black (0).
For system internal usage.
SendClearSend()
Called up to confirm to FlexLoader Vision that an interlayer has
been picked. Used in certain cases when picking from pallets.
SendConfirmInterlayer-
PickCam1...4()
For system internal usage.
SendConfirmPick-
Cam1...4()
For advanced integration only. Used to change detail during oper-
ation.
Note
Use this functionality with care. Ensure that all other processes
are finished before calling SelectDetailOnTheFly, else unpredict-
able behaviour or system crashes might occur.
SelectDetailOn-
TheFly(nCamera,
sGroupName, sDetail-
Name)
Called up to set a new edge height in the selected camera. Usually
used when running stacks on the belt.
SendEdgeHeight(nCam-
era, nEdgeHeight)
For system internal usage.
SendGrab(nCamera)
For system internal usage.
SendStop()
Called up to set an alarm in FlexLoader Vision from the robot.
SetAlarm(sMessage)
Called up to set an information message in FlexLoader Vision
from the robot.
SetInformation(sMes-
sage)
Called up to set a warning in FlexLoader Vision from the robot.
SetWarning(sMessage)
Starts the belt under the selected camera. Usually only used from
VisionCom
.
StartBelt(nCamera)
Called up to write a text to the selected file name on the FlexLoader
Vision computer.
WriteFileFlexLoader
Vision(sFileName,
sMessageData)
Calibration3D.sys
This module contains routines needed for the calibration of 3D cameras.
Important routines
Description
Routine
This routines performs the actual calibration in cooperation with
FlexLoader Vision.
Calibration3DRoutine
Support routine for convenient update and control of all calibration
positions.
Calibration3DUpdate-
Positions
Continues on next page
262
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
B FlexLoader RAPID reference
B.2 FlexLoader Vision interface
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































