





























Description
Routine
Is always called up first in the main program The routine warns
the user that the robot is too far from its home position at start-
up.
SafeRobotStart()
Calculate and set correct robot speed depending on weight of
detail/details in gripper.
SetSpeed()
This routine is called on start event. Fill with suitable code if
needed in application.
StartEvent()
This routine is called on stop event. Fill with suitable code if
needed in application.
StopEvent()
Set up all used tools in the cell.
ToolSetup()
MoveRobotVia.mod
The principal motion in the FlexLoader Vision is controlled by the MoveRobotTo
routine, which moves the robot from known zone positions to a target zone position.
From these zone positions (via-positions), movement within certain areas of the
robot cell can be initiated.
The MoveRobotTo routine is defined and verified for standard parts (as defined
by the product specification) and standard 3-finger grippers in a standard
FlexLoader Vision configuration. When components are moved, rotated, enlarged
or otherwise modified, the MoveRobotTo routine has to be verified again.
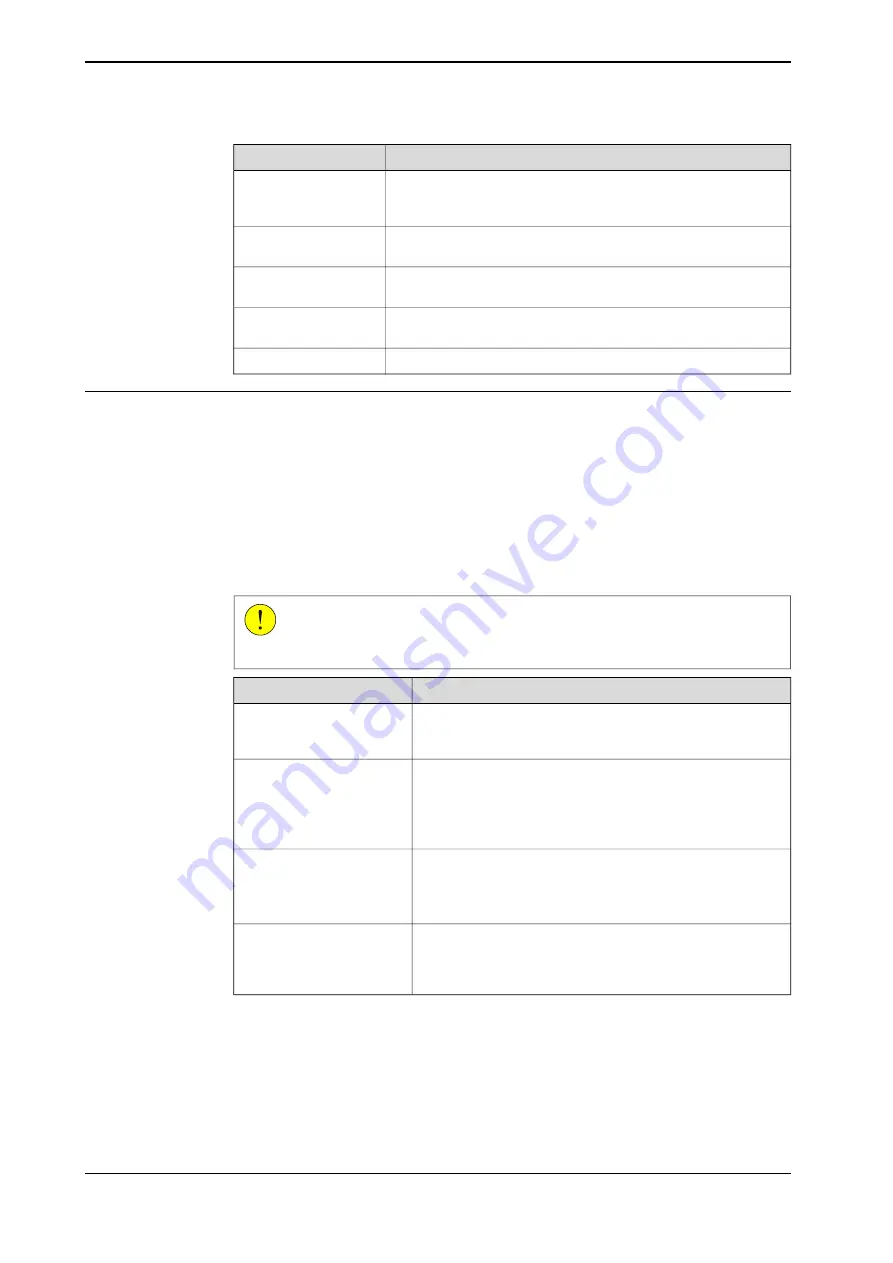
CAUTION
When starting the robot from unknown positions, collisions can occur.
Description
Routine
This procedure checks where the robot is positioned. Returns
correct number for the zone the robot currently is positioned
in.
CheckPos()
Moves robot to home position.
GoHome()
Not to be used from any position. Make sure robot can move
to closest via position before calling this. Robot must be
jogged in manual to a position where it is possible to go
straight to closest via-position.
This routine moves the robot to a selected zone.
MoveRobotTo()
All via-positions are collected at the end of the routine to
simplify modifying by ModPos. When modifying zones or via
positions, be sure that the movements are still possible
This procedure shall to be called manually. It helps the oper-
ator to move robot between different stations in the cell. A
menu with different zones is presented. The robot will execute
the MoveRobotTo routine with the selected target zone.
ViaPositions()
Continues on next page
268
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
B FlexLoader RAPID reference
B.3 FlexLoader application functionality
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......


































































