






















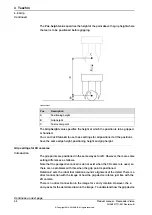






detail. For the robot to pick the detail correctly, this must be compensated for with
the gripper settings on the
Grip
tab.
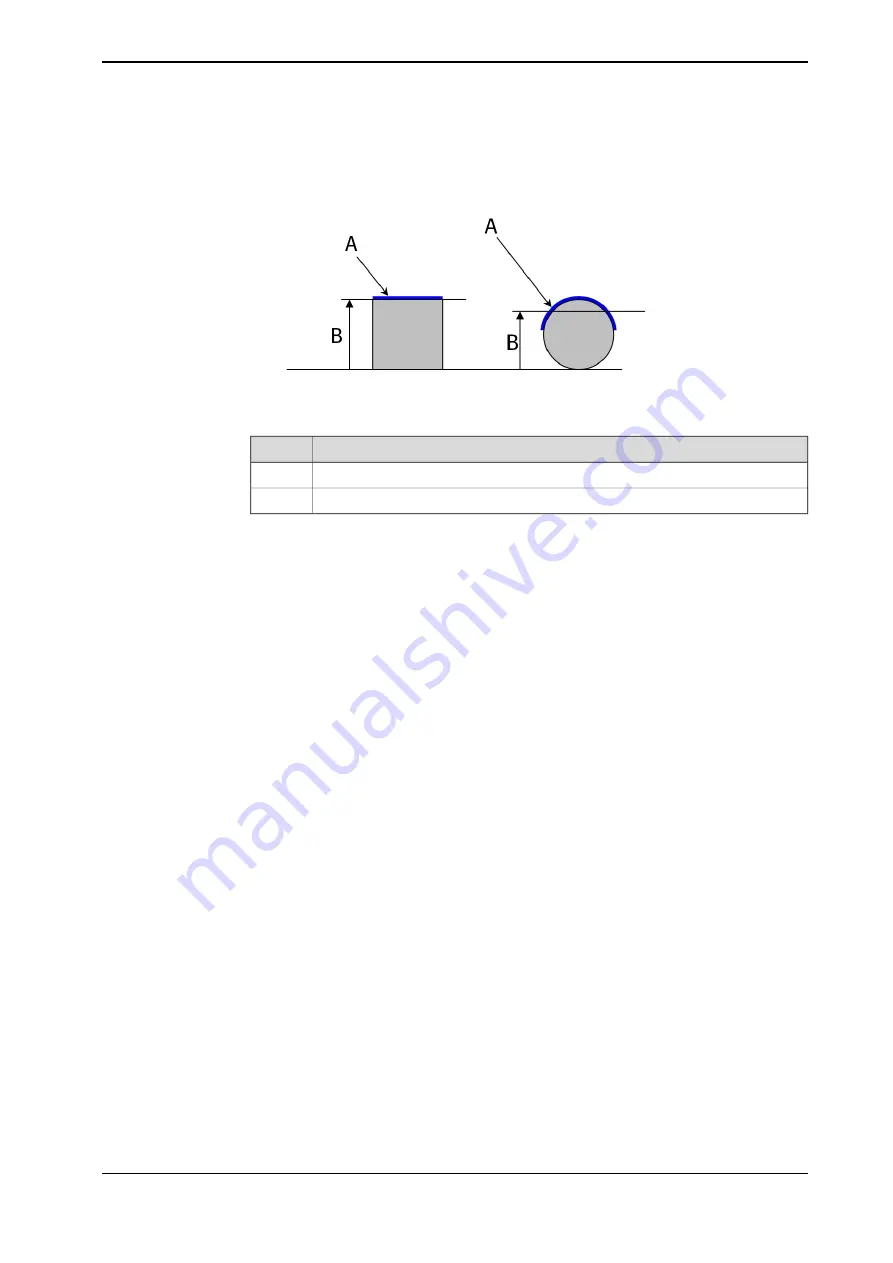
xx1800000304
Description
Pos.
Height region
A
Located height
B
Product manual - FlexLoader Vision
41
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
4 Teachin
4.6 Parameters
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































