













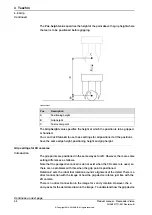















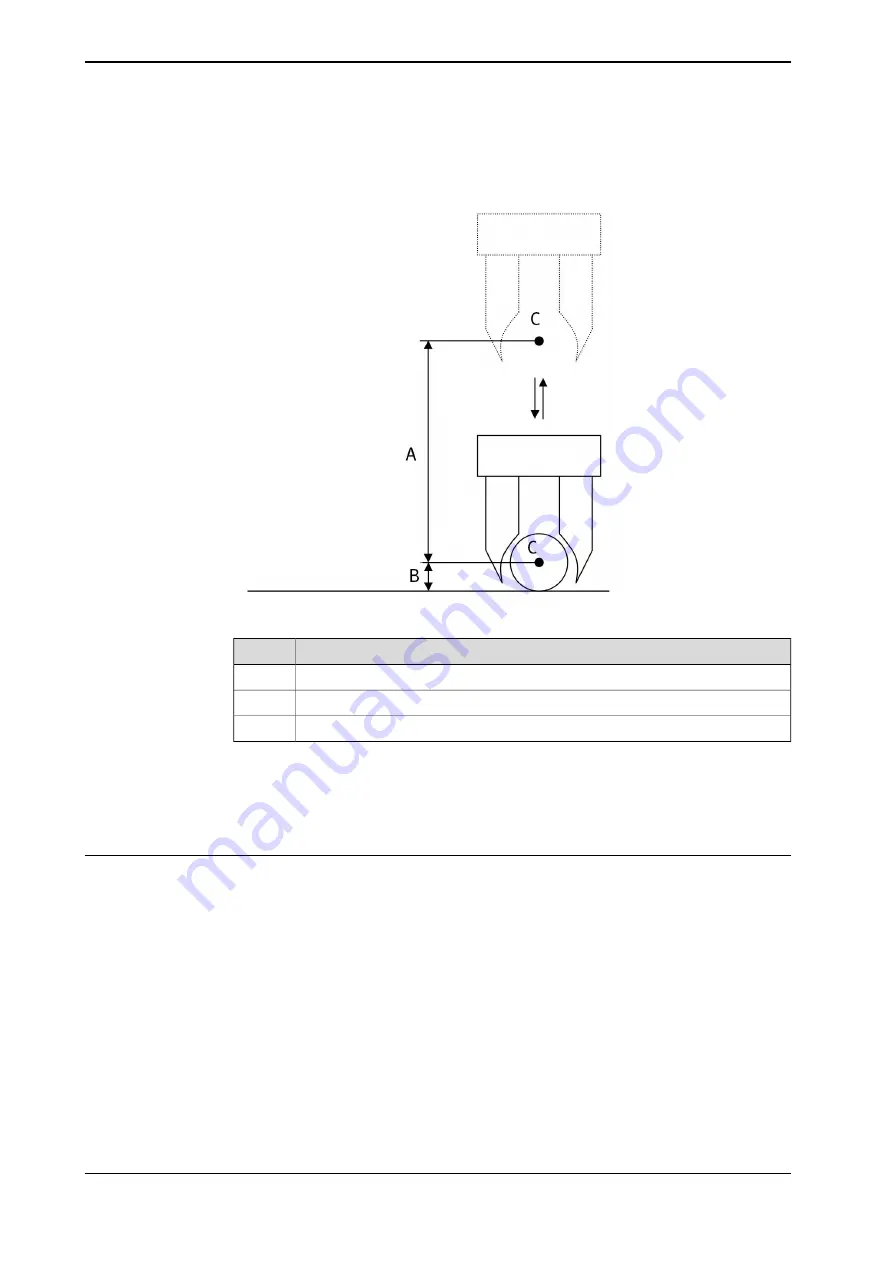
The
Pos. height
value specifies the height of the point above the grip height where
the tool is to be positioned before gripping.
xx1800001044
Description
Pos.
Positioning height
A
Grip height
B
Tool center point
C
The
Grip height
value specifies the height at which the position is to be gripped
or handled.
You can click
Clone all
to use these settings for all positions if all the positions
have the same edge height, positioning height and grip height.
Grip settings for 3D cameras
Introduction
The grip points are positioned in the same way as for 2D. However, there are some
setting differences as follows.
Note that the perspective concerns do not exist when the 3D camera is used, so
there are no problems with this when the grip point is positioned.
Rotation Z sets the robot tool rotation around z alignment of the detail. There is a
direct connection with the image of how the grip device rotates, just like with the
2D camera.
There is no direct connection in the image for x and y rotation. However, the x-
and y-axes for the detail are drawn in the image. To understand how the grip device
Continues on next page
50
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
4 Teachin
4.8 Grip
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































