




























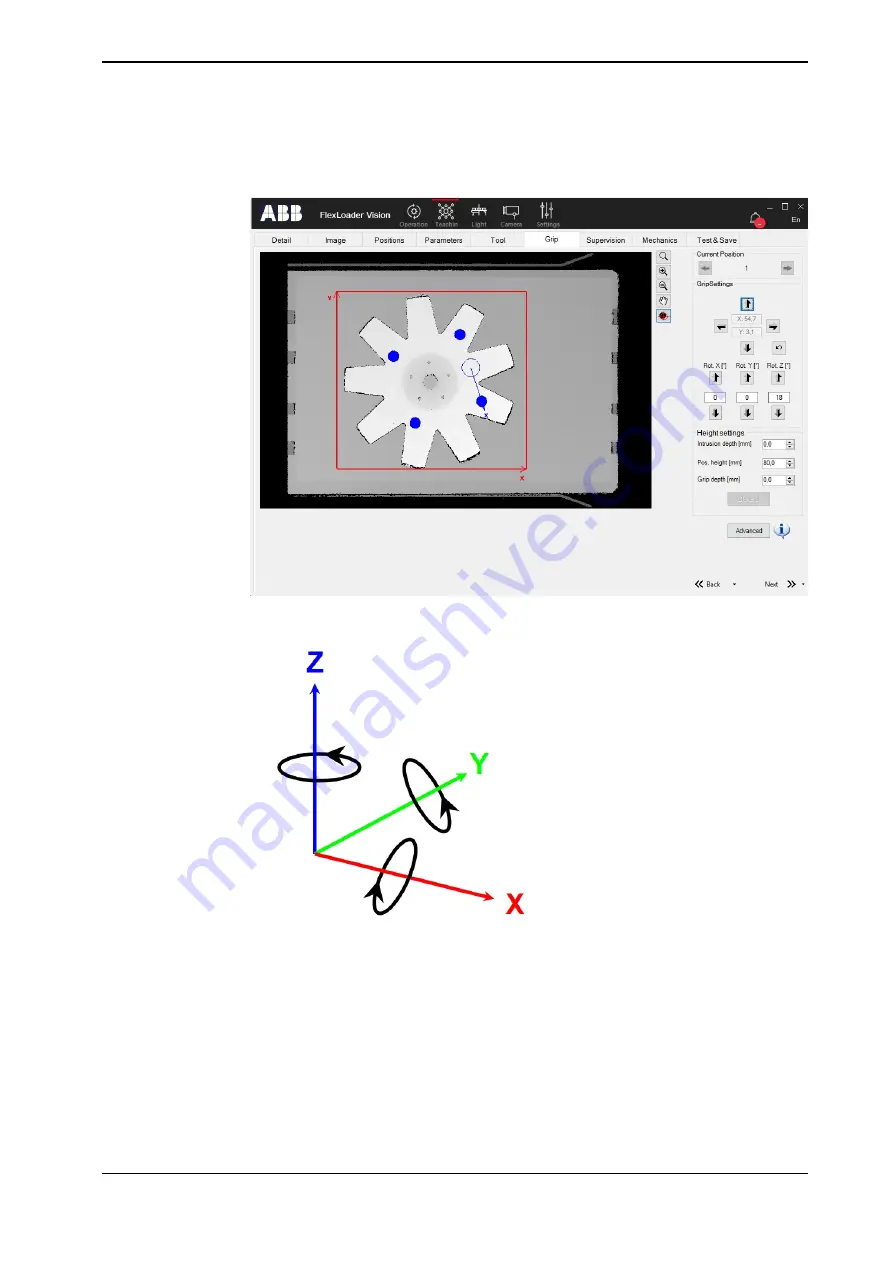
will rotate, bear in mind that the z-axis occurs first, then rotation around the y-axis
and finally rotation around the x-axis.
xx1800000223
xx1800000307
Figure 4.5: Directions of rotation
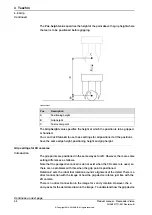
Height settings
The
Intrusion depth
value specifies how deep the grip device goes below the
located detail height at the picking position. The depth is measured positively from
the located detail height and down. This value is used to determine at what height
a check for gripper collision occurs.
Positioning height
has the same function as for 2D cameras.
Continues on next page
Product manual - FlexLoader Vision
51
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
4 Teachin
4.8 Grip
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































