




























The
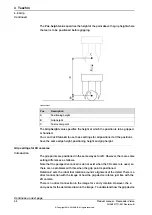
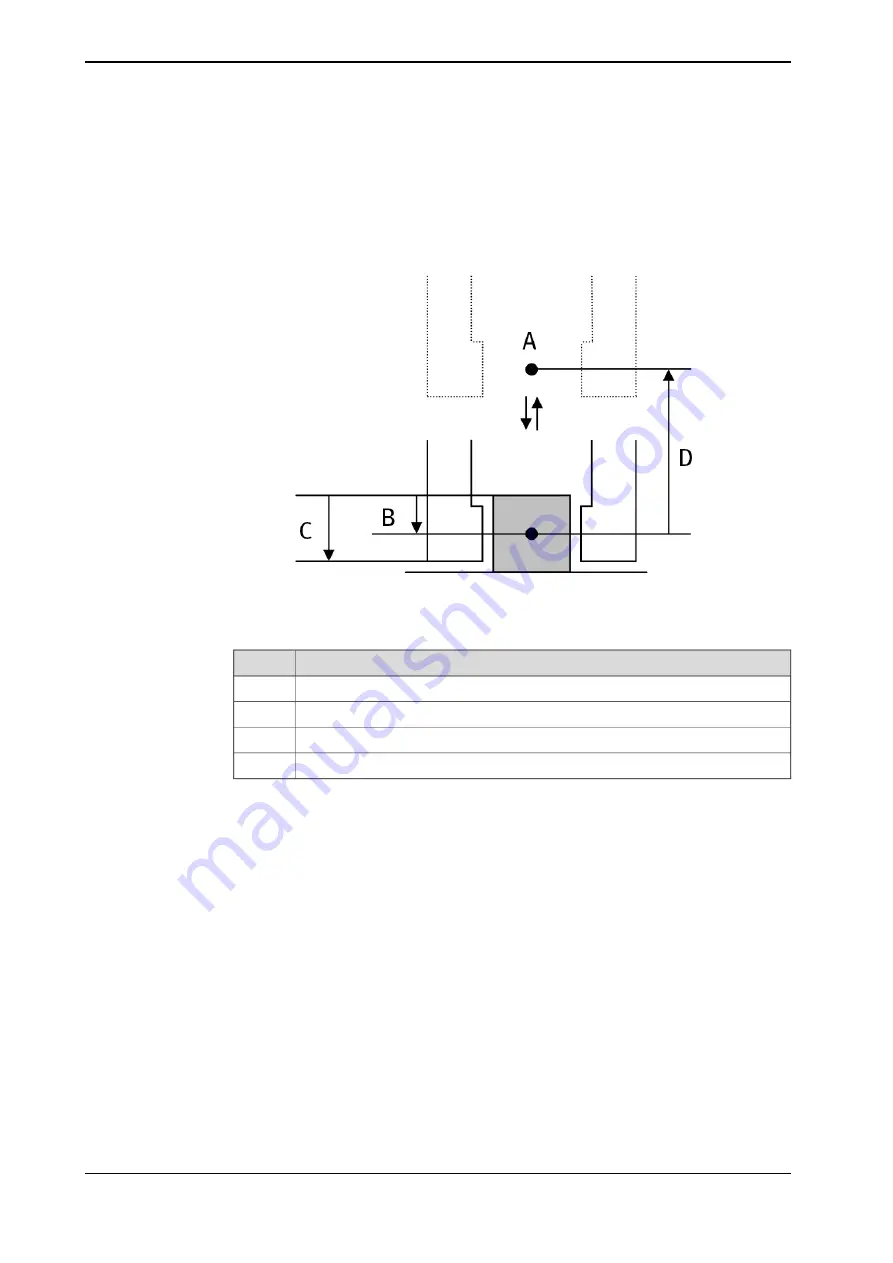
Grip depth
value specifies how deep the TCP of the grip device goes below
the located detail height at the picking position. The depth is measured positively
from the located detail height and down. This value is used to determine what grip
height is to be sent to the robot.
xx1800000308
Description
Pos.
Tool center point
A
Grip depth
B
Intrusion depth
C
Positioning height
D
52
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
4 Teachin
4.8 Grip
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......


































































