




























in the image, which makes it easy to see how the different filters affect the image
processing.
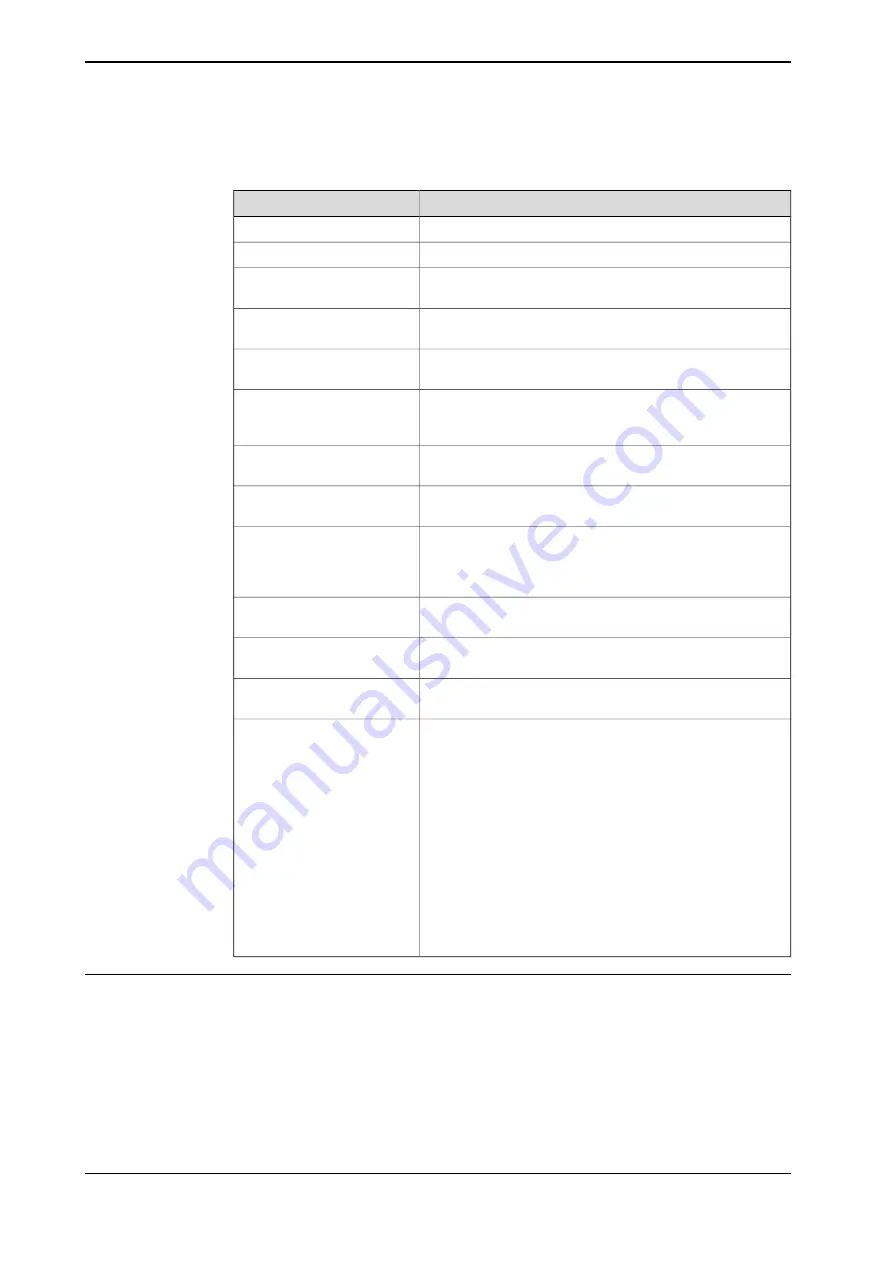
Description
Filter name
Makes the image fuzzier and softens up the edges.
Smooth
Makes the edges in the image more distinct.
Sharpen
Creates a new image that reflects the edges in the original
image.
SobelEdge
Similar to the
SobelEdge
filter but primarily reproduces the
vertical edges in the image.
VerticalEdge
Similar to the
SobelEdge
filter but primarily reproduces the
horizontal edges in the image.
HorizontalEdge
Similar to the
SobelEdge
filter, but the edges are made
thinner and softer. This can be useful if the original image
has a very high contrast.
LaplacianEdge
Converts all of the pixels below a certain light level to black.
This light level is set as a threshold value by the users.
CutBelowThreshold
Converts all of the pixels above a certain light level to white.
This light level is set as a threshold value by the users.
CutAboveThreshold
Divides the image into areas of black and white. All of the
pixels above a certain light level are converted to white and
the rest are converted to black. This light level is set as a
threshold value by the users.
BinzarizeAtThreshold
Inverts the image, so that all the light pixels are made dark
and vice versa.
Invert
Reduces the size of light areas by deleting a small area along
the entire edge.
Erode
Increases the size of the light areas by adding a small area
along the entire edge.
Dilate
A specialized filter that simplifies the identification of details
in several cases.
BlockPickedParts
If the coordinates of a detail are sent to the robot, a circle
with the specified parameter will be drawn in the subsequent
images at the location where the detail is identified.
This filter selection is only valid for the first filtering set.
The
BlockPickedParts
filter is typically used for details in
trays, where the shape of the empty tray often is similar to
a detail and can erroneously be identified as a detail. Another
scenario is when a machined detail that is very similar to the
raw part is put back at the same position as the raw part was
picked.
Resetting the picked parts collection is done by the robot,
by sending the
ResetPickedPositions
command.
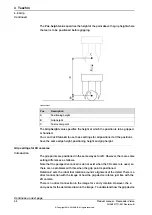
Movement supervision
The movement supervision helps prevent details from moving after the image has
been taken. This prevents, as far as possible, the robot from gripping for details
that have shifted positions, or from colliding with details that have moved under
the gripper.
The movement supervision takes two images of the image field with a small time
difference and compares them. If there are differences between these images, the
Continues on next page
64
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
5 Advanced teachin settings
5.1 Advanced image settings
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































