





























•
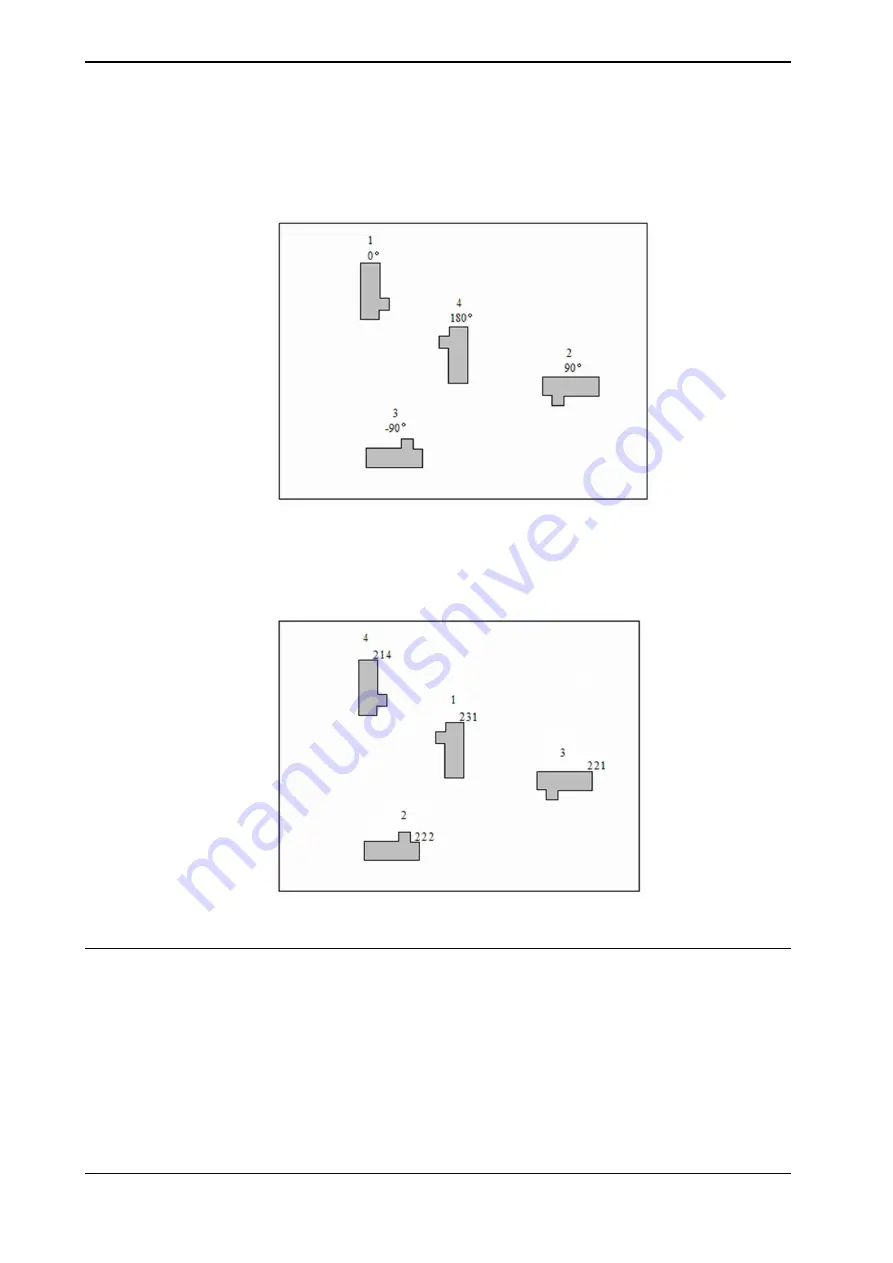
Angle
: The coordinates of the position that is closest to the selected angle
are sent first. If the selected angle is 0, the coordinates are sent in the order
shown in the image below.
xx1800001048
•
Highest match
: This sorting condition is only available for 3D cameras. The
detail located at the highest level is sent to the robot first. The located height
of each detail is shown in millimetres in the image.
xx1800001053
Limitations
In some cases it may be desirable to prevent the robot from gripping or handling
details when they are lying in certain positions and/or angles. This is done by
specifying gripping limitations for the detail. Before you can activate the gripping
limitations they must be defined in the system. For more information on this, see
Gripping Limitations on page 114
.
When this is done, you can select the limitations that you want to apply to the detail
from this list. The number of limitations that can be activated for a detail is unlimited.
86
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
5 Advanced teachin settings
5.4 Advanced grip settings
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































