
























References
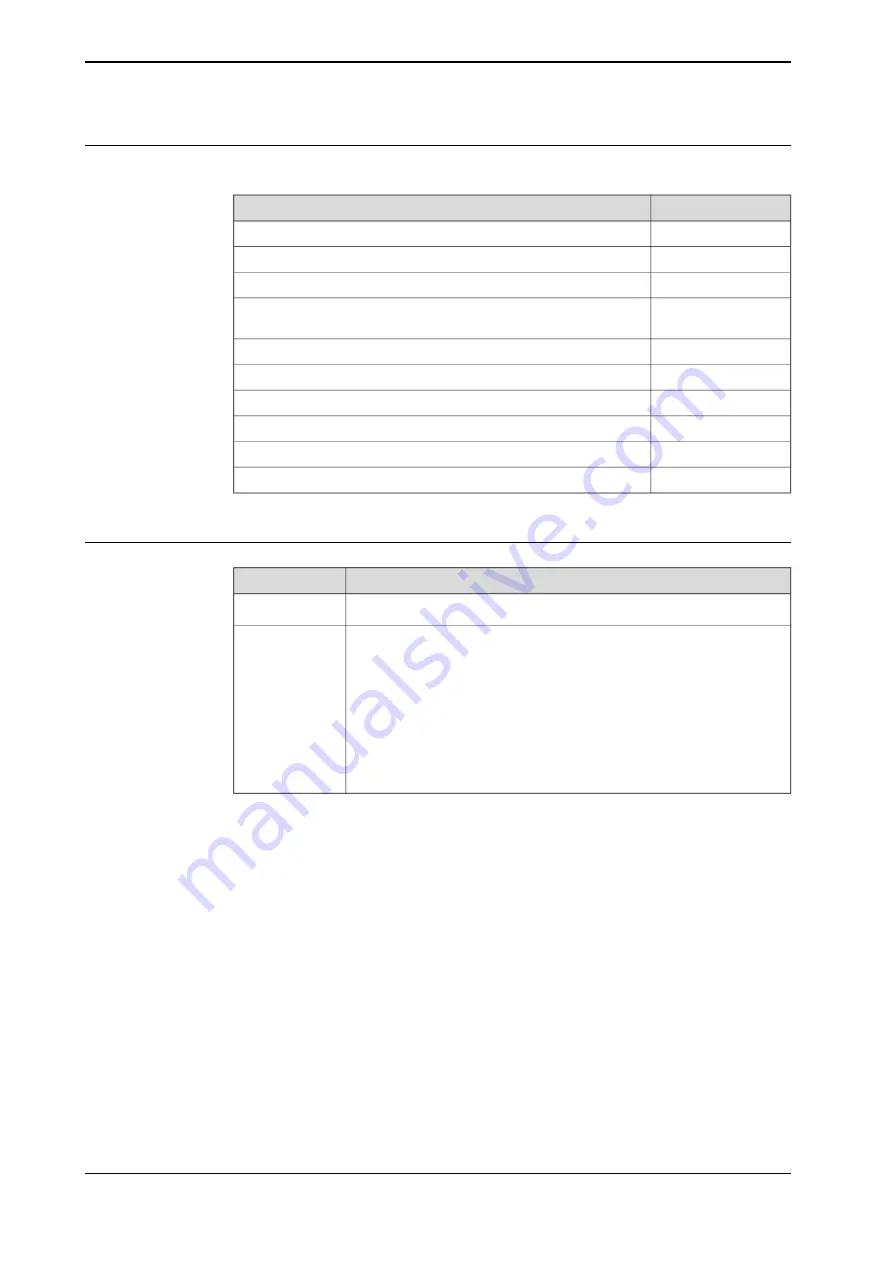
Documentation referred to in the manual, is listed in the table below.
Document ID
Document name
3HAC081965-001
Product manual, spare parts - IRB 1010
3HAC081966-001
Product specification - IRB 1010
3HAC080051-003
Circuit diagram - IRB 1010
3HAC031045-001
Safety manual for robot - Manipulator and IRC5 or OmniCore con-
troller
i
3HAC079399-001
Product manual - OmniCore E10
3HAC065036-001
Operating manual - OmniCore
3HAC066554-001
Application manual - Controller software OmniCore
3HAC066553-001
Technical reference manual - Event logs for RobotWare 7
3HAC042927-001
Technical reference manual - Lubrication in gearboxes
3HAC065041-001
Technical reference manual - System parameters
i
This manual contains all safety instructions from the product manuals for the manipulators and the
controllers.
Revisions
Description
Revision
First edition.
A
Published in release 22D. The following updates are done in this revision:
B
•
Added information about Wrist Optimization in calibration chapter.
•
Updated the description about calibration tool used for axis calib-
ration.
•
Updated the procedure of securing the cable package in axis 4
during spare part replacement.
•
Minor editorial changes.
10
Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
Overview of this manual
Continued
Summary of Contents for IRB 1010
Page 1: ...ROBOTICS Product manual IRB 1010 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 46: ...This page is intentionally left blank ...
Page 80: ...This page is intentionally left blank ...
Page 306: ...This page is intentionally left blank ...
Page 312: ...This page is intentionally left blank ...
Page 326: ...This page is intentionally left blank ...
Page 328: ...This page is intentionally left blank ...
Page 332: ......
Page 333: ......



































































