





























3.4 Working range alterations
3.4.1 Adjusting the working range
Reasons for adjusting the manipulator working range
The working range of each manipulator axis is configured in the software. If there
is a risk that the manipulator may collide with other objects at installation site, its
working space should be limited. The manipulator must always be able to move
freely within its entire working space.
Working range configurations
The parameter values for the axes working range can be altered within the allowed
working range and according to available options for the robot, either to limit or to
extend a default working range. Allowed working ranges and available options for
each manipulator axis are specified in
.
Mechanical stops on the manipulator
Mechanical stops are and can be installed on the manipulator as limiting devices
to ensure that the manipulator axis does not exceed the working range values set
in the software parameters.
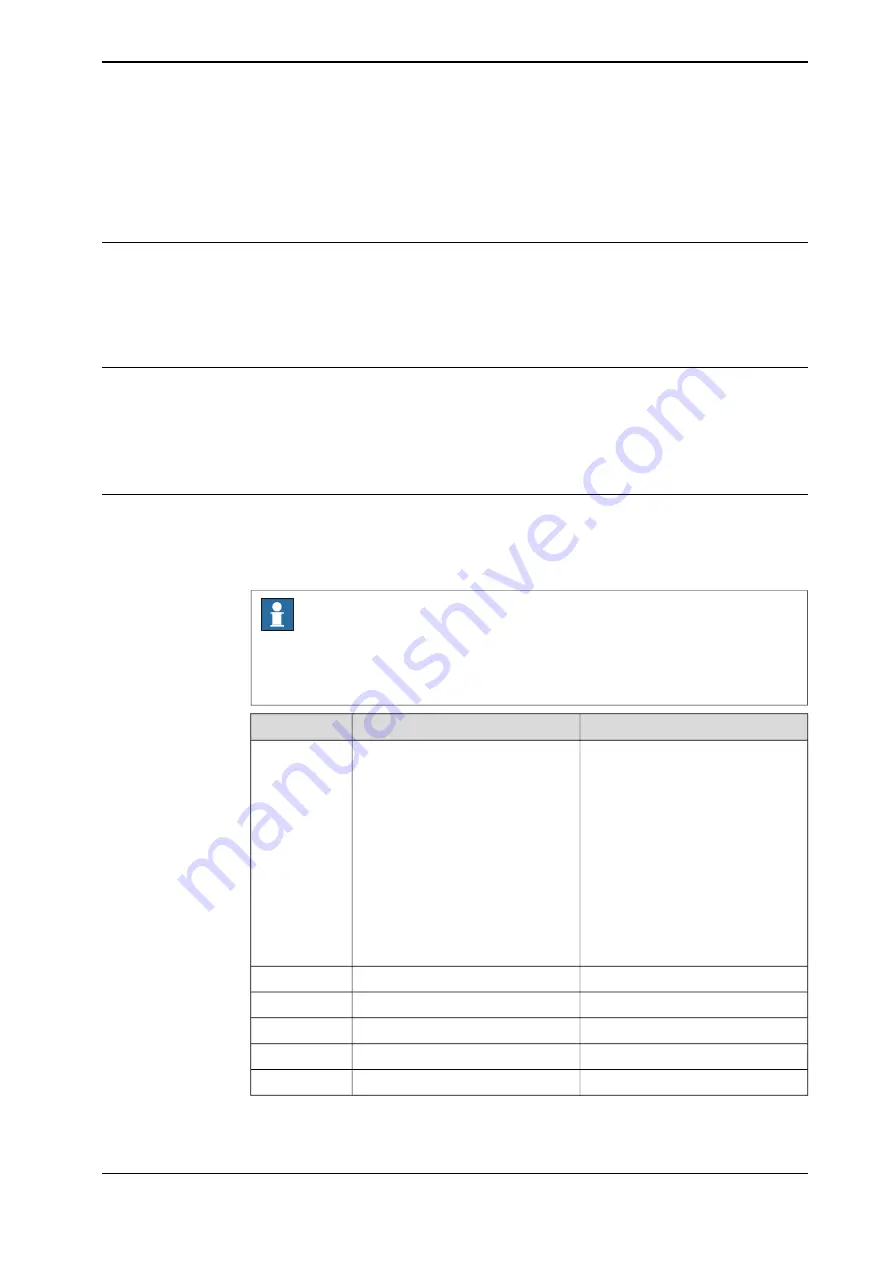
Note
The mechanical stops are only installed as safety precaution to physically stop
the robot from exceeding the working range set. A collision with a mechanical
stop always requires actions for repair and troubleshooting.
Movable mechanical stop
ii
Fixed mechanical stop
i
Axis
yes
The working range can be reduced
by altering the parameter values. In-
stallation of additional mechanical
stops is recommended as a safety
measure. Addition mechanical stops
are not delivered with the robot and
shall be designed according to actual
applications and site requirements.
See
for hole
dimensions when designing and
preparing the stops. Contact ABB for
more information.
yes
Axis 1
no
yes
Axis 2
no
yes
Axis 3
no
yes
Axis 4
no
yes
Axis 5
no
no
Axis 6
i
Part of the casting or fixed on the casting and can not /should not be removed.
ii
Can be installed in one or more than one position, to ensure a reduced working range, or be removed
to allow extended working range.
Product manual - IRB 1010
67
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.4.1 Adjusting the working range
Summary of Contents for IRB 1010
Page 1: ...ROBOTICS Product manual IRB 1010 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 46: ...This page is intentionally left blank ...
Page 80: ...This page is intentionally left blank ...
Page 306: ...This page is intentionally left blank ...
Page 312: ...This page is intentionally left blank ...
Page 326: ...This page is intentionally left blank ...
Page 328: ...This page is intentionally left blank ...
Page 332: ......
Page 333: ......







































































