





























Note
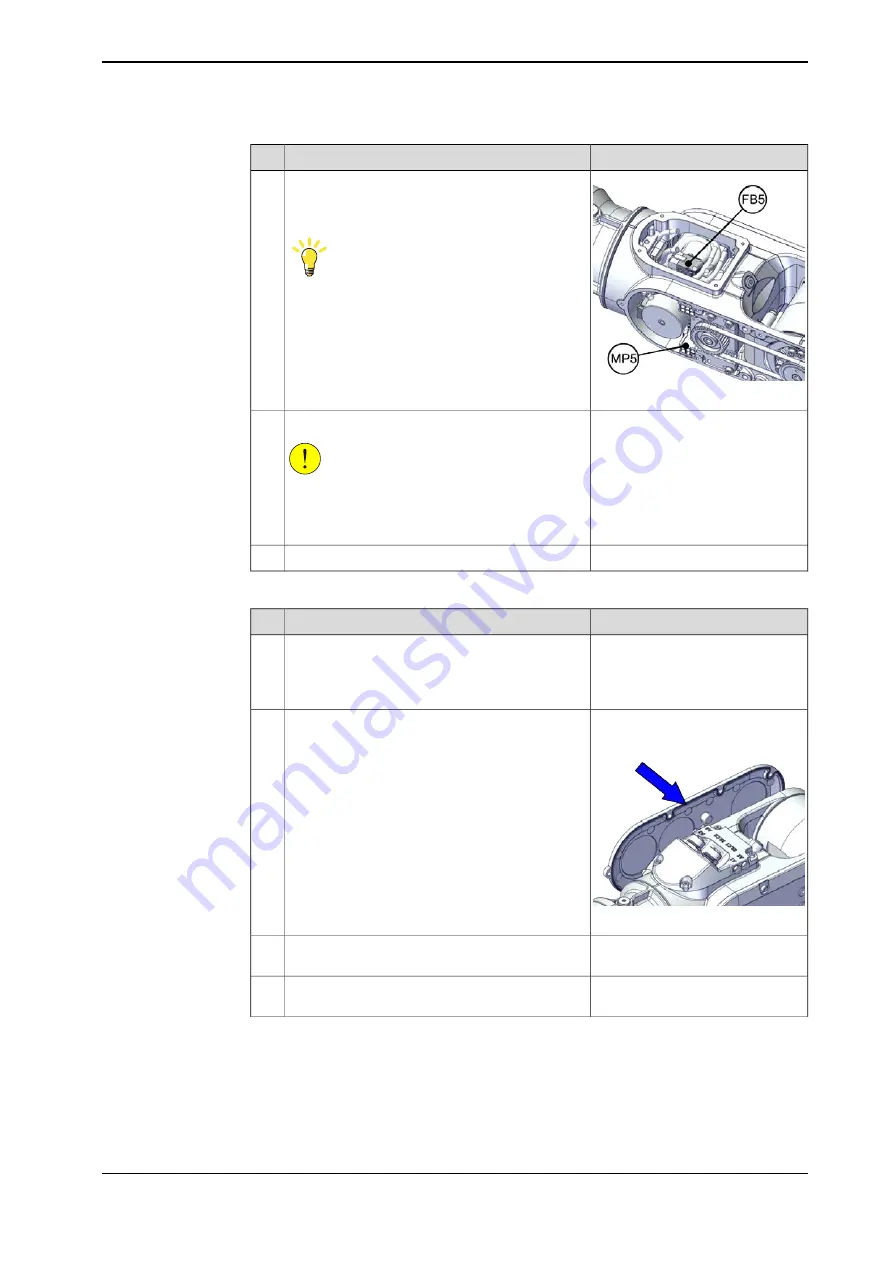
Action
xx1800003025
Reconnect the connectors.
•
FB5
•
MP5
Tip
See the number markings on the connectors for
help to find the corresponding connector.
2
Route and secure the cabling with cable straps.
CAUTION
Correct cable routing is highly important.
If the cables are routed and secured incorrectly
the cables can be damaged.
3
Insert the cabling and connectors into the wrist.
4
Refitting the wrist cover
Note
Action
For robots with protection type Clean Room:
1
Clean the joints that have been opened and wipe
the parts free from particles with spirit on a lint
free.
Gasket for wrist cover:
3HAC061959-009
xx1900002181
For robots with protection class IP67 (option
3350-670)
For robots with protection type Clean Room
(option 3351-4)
Check the gasket.
Replace if damaged.
2
Apply grease to the cable package, cover all
moving area of the package.
3
Apply grease to the cover that has contacting area
with the cable package.
4
Continues on next page
Product manual - IRB 1100
559
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
5 Repair
5.7.5 Replacing the axis-5 motor
Continued
Summary of Contents for IRB 1100
Page 1: ...ROBOTICS Product manual IRB 1100 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 738: ...This page is intentionally left blank ...
Page 760: ...This page is intentionally left blank ...
Page 764: ......
Page 765: ......







































































