





























Note
Action
xx1800002947
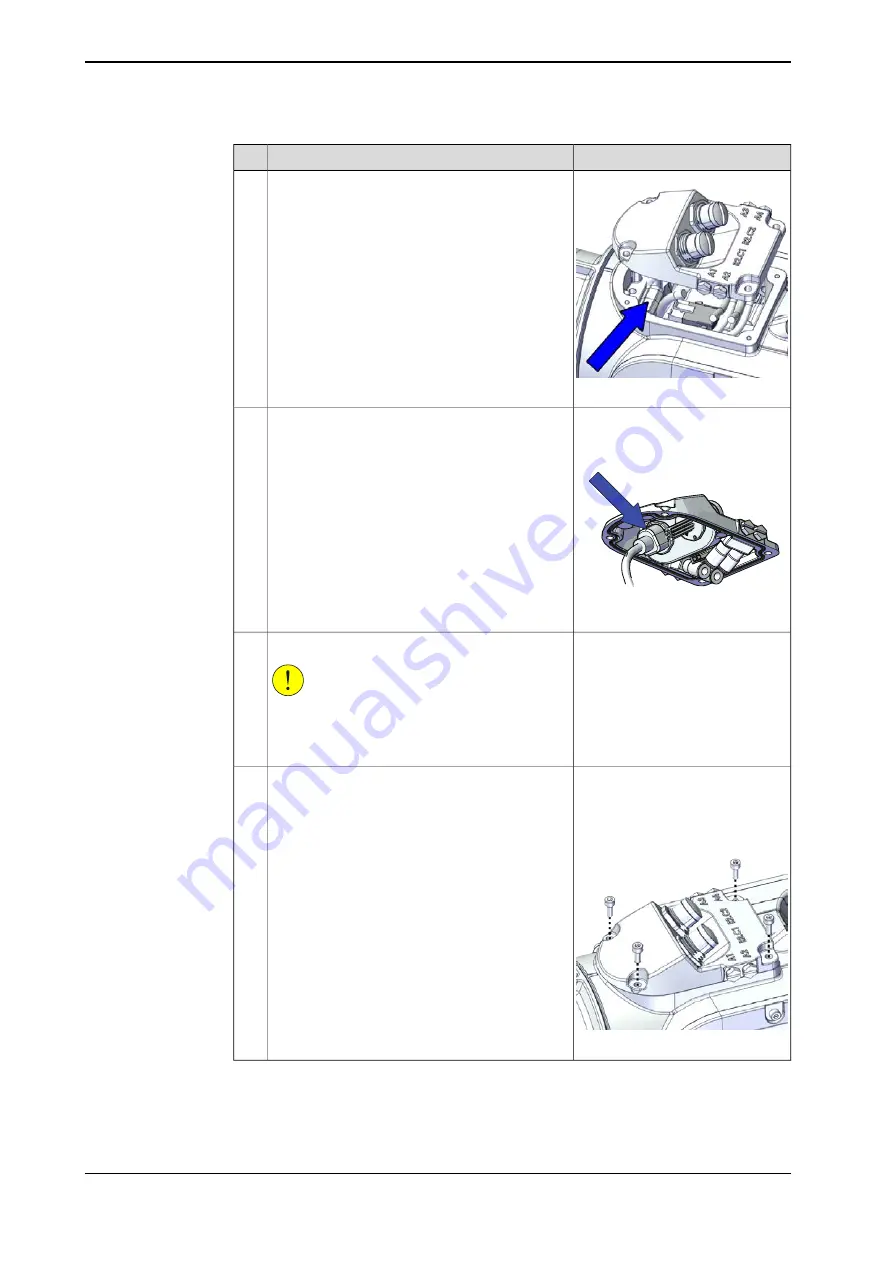
For robots with CP/CS cabling
Reconnect the connector.
•
J5.C1
4
J5.C2 connector assembly tool, in-
cluded in the special toolkit
3HAC071022-001
xx1800002948
For robots with Ethernet cabling
Reconnect the connector J5.C2 using the tool.
5
Route and secure the cabling with cable straps.
CAUTION
Correct cable routing is highly important.
If the cables are routed and secured incorrectly
the cables can be damaged.
6
Screw: M3x8 12.9 Lafre
2C2B/FC6.9 (4 pcs)
Refit the cover.
7
Tightening torque: 1.2 Nm
xx1800002944
Continues on next page
708
Product manual - IRB 1100
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
5 Repair
5.8.4 Replacing the axis-4 gearbox
Continued
Summary of Contents for IRB 1100
Page 1: ...ROBOTICS Product manual IRB 1100 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 738: ...This page is intentionally left blank ...
Page 760: ...This page is intentionally left blank ...
Page 764: ......
Page 765: ......







































































