





























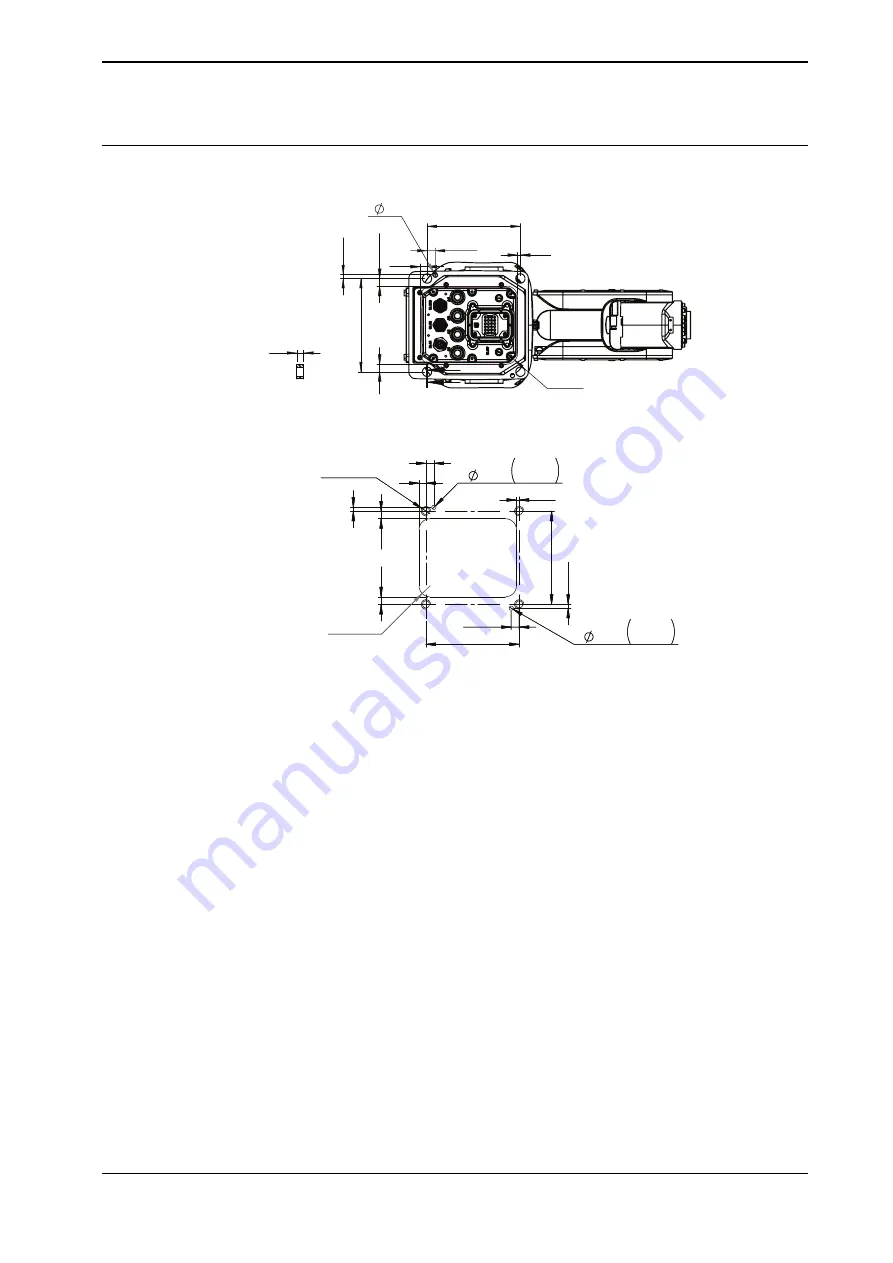
Hole configuration, base
This illustration shows the hole configuration used when securing the robot.
4x M12
11
11
10
4
135
135
6 H7
+
0.012
0
5.5
11.5
11.5
5.5
6 H7
+
0.012
0
4x R16
135
135
11
11
10
4
R16
11.5
5.5
6
A A
10
A-A
4x M12
11
11
10
4
135
135
6 H7
+
0.012
0
5.5
11.5
11.5
5.5
6 H7
+
0.012
0
4x R16
xx1800002448
Product manual - IRB 1100
65
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.2 Orienting and securing the robot
Continued
Summary of Contents for IRB 1100
Page 1: ...ROBOTICS Product manual IRB 1100 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 738: ...This page is intentionally left blank ...
Page 760: ...This page is intentionally left blank ...
Page 764: ......
Page 765: ......






































































